fishros
4 years ago
fishros
4 years ago
commit
1421df9ed0
100 changed files with 1434 additions and 0 deletions
+ 80
- 0
.gitignore
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 97
- 0
README.en.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 97
- 0
README.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 0
- 0
docs/.nojekyll
+ 1
- 0
docs/CNAME
|
||
|
||
+ 97
- 0
docs/README.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/README/imgs/image-20210726192026520.png
{kind=link}

+ 67
- 0
docs/_sidebar.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 58
- 0
docs/chapt1/1.1ROS2的前世今生.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/chapt1/1.1ROS2的前世今生/imgs/image-20210717140505596.png
{kind=link}

BIN
docs/chapt1/1.1ROS2的前世今生/imgs/image-20210717150453689.png
{kind=link}

+ 100
- 0
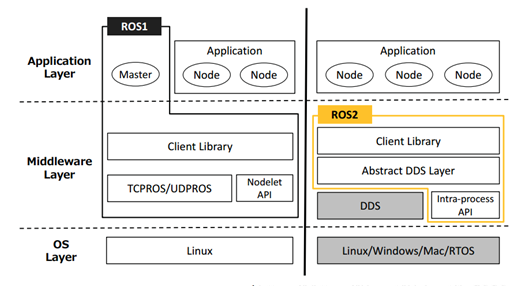
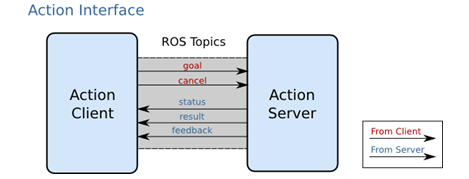
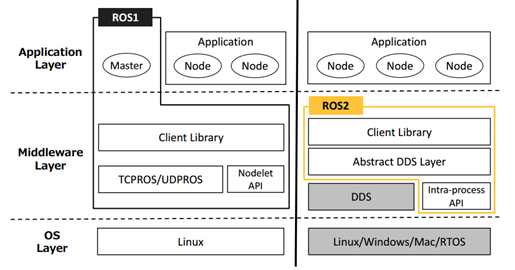
docs/chapt1/1.2ROS与ROS2对比.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/chapt1/1.2ROS与ROS2对比/imgs/20210714103924121.jpg
{kind=link}

BIN
docs/chapt1/1.2ROS与ROS2对比/imgs/image-20210717150453689.png
{kind=link}

BIN
docs/chapt1/1.2ROS与ROS2对比/imgs/image-20210717151353613.png
{kind=link}

BIN
docs/chapt1/1.2ROS与ROS2对比/imgs/image-20210717153612576.png
{kind=link}
BIN
docs/chapt1/1.2ROS与ROS2对比/imgs/image-20210719213126060.png
{kind=link}

+ 124
- 0
docs/chapt1/1.3课外阅读_ROS镇长与艳娘传奇.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/chapt1/1.3课外阅读_ROS镇长与艳娘传奇/imgs/image-20210717153837468.png
{kind=link}

BIN
docs/chapt1/1.3课外阅读_ROS镇长与艳娘传奇/imgs/image-20210717153854839.png
{kind=link}

BIN
docs/chapt1/1.3课外阅读_ROS镇长与艳娘传奇/imgs/image-20210719035457656.png
{kind=link}
BIN
docs/chapt1/1.3课外阅读_ROS镇长与艳娘传奇/imgs/image-20210719035457657
+ 73
- 0
docs/chapt1/1.4扩展阅读_中间件.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/chapt1/1.4扩展阅读_中间件/imgs/v2-471abbce0a08b249637dc603f56dc9cf_b.png
{kind=link}
BIN
docs/chapt1/1.4扩展阅读_中间件/imgs/v2-9ac28902f8d0032c6d4d9ba13b1e4f6b_720w.png
{kind=link}

BIN
docs/chapt1/1.4扩展阅读_中间件/imgs/v2-e6dbd2aa59c57d6bda2fcb25d83f1a34_b.png
{kind=link}

+ 32
- 0
docs/chapt1/章节介绍.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 136
- 0
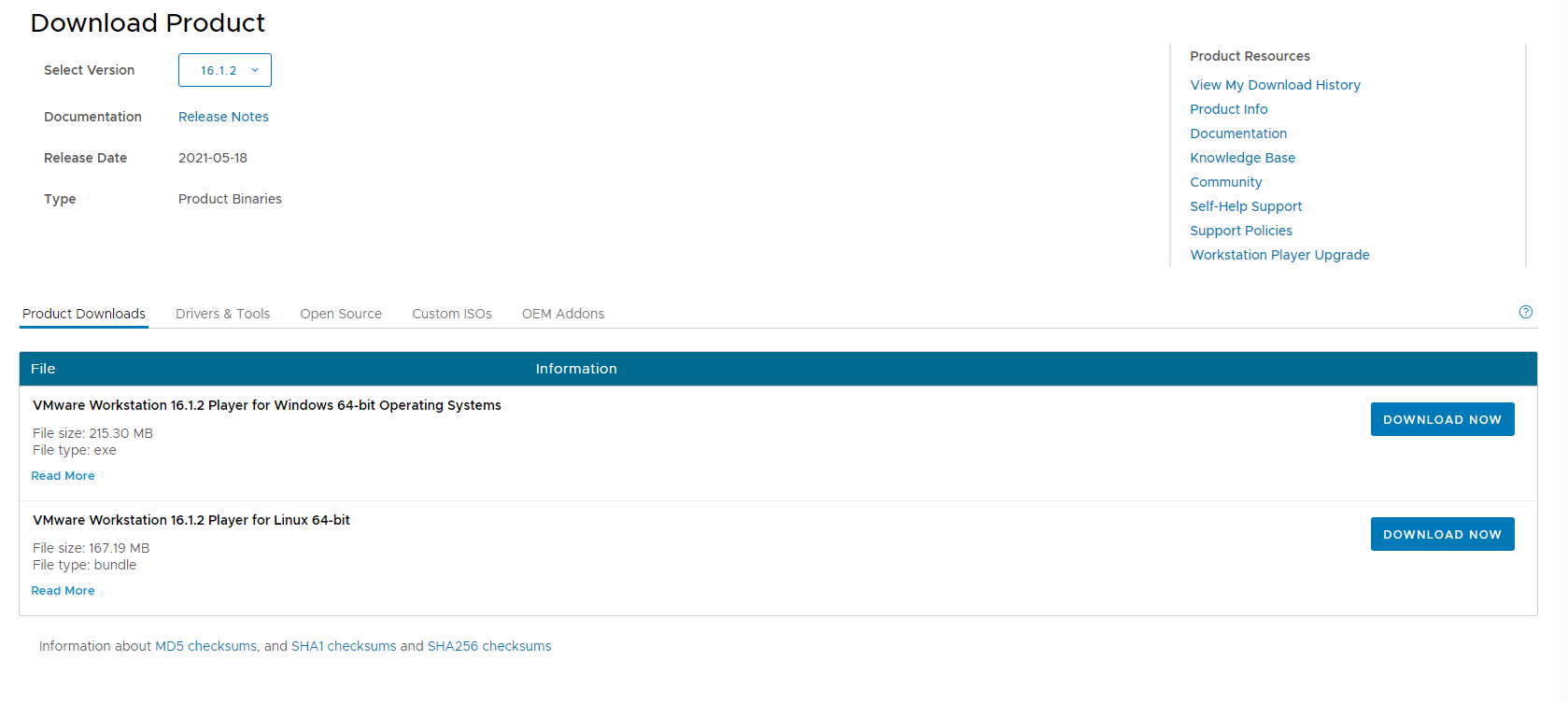
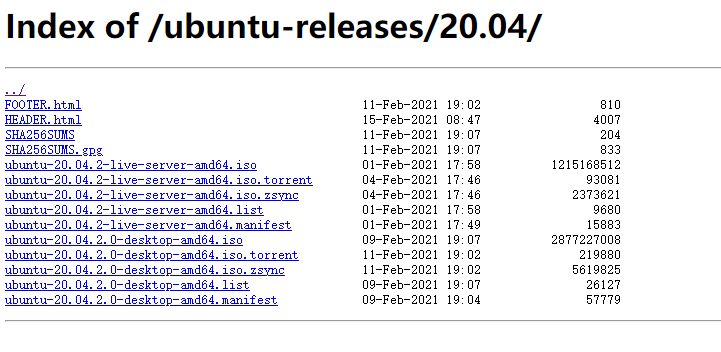
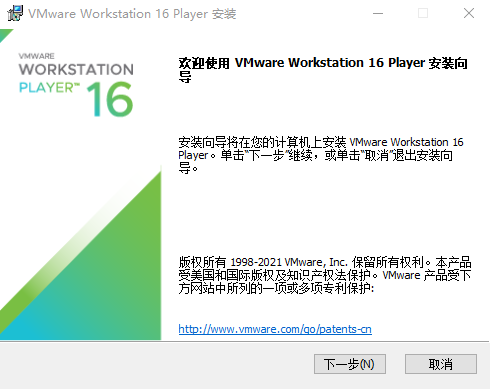
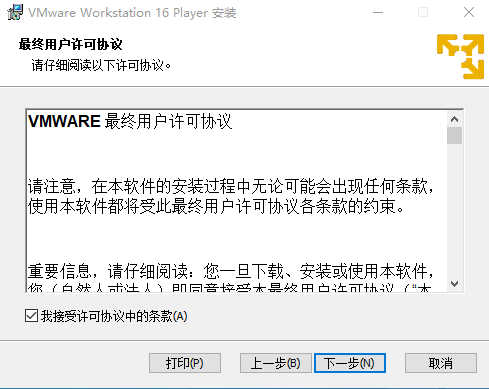
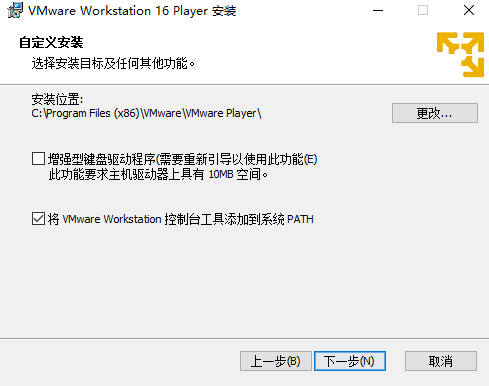
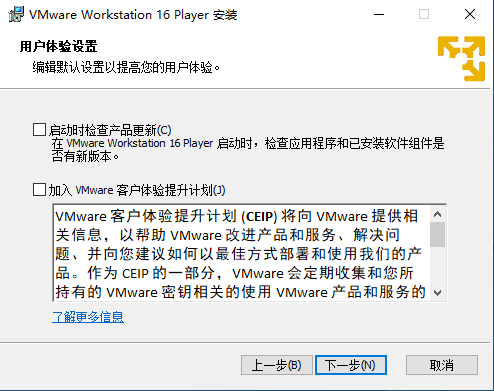
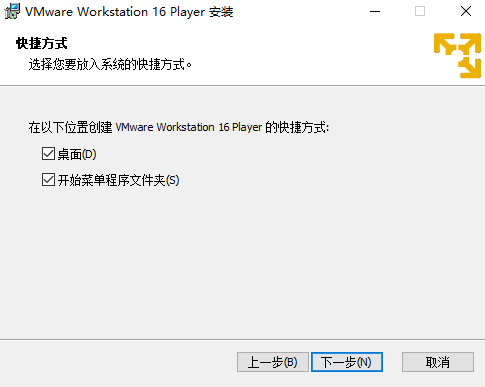
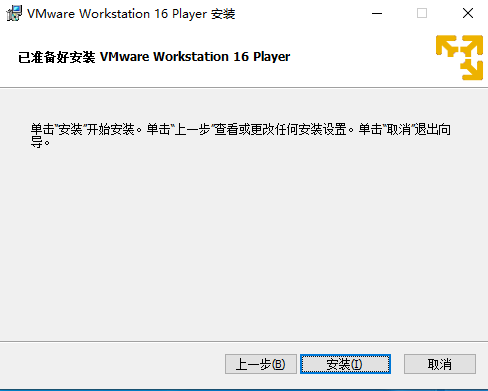
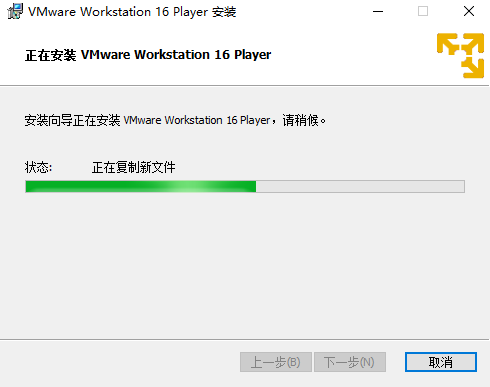
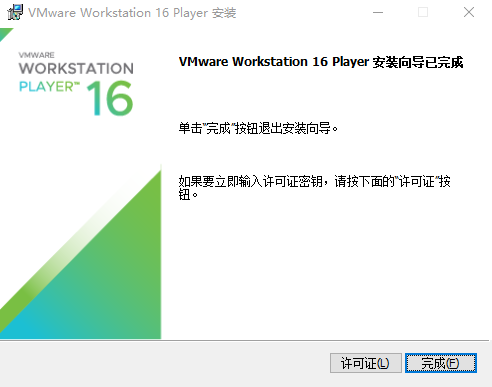
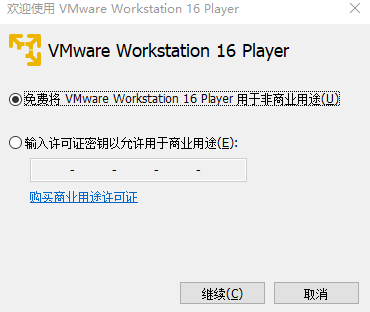
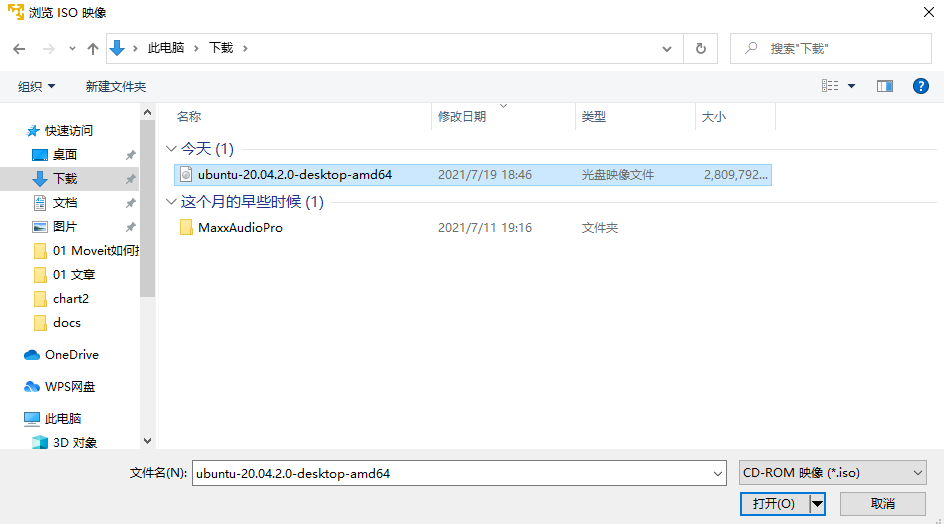
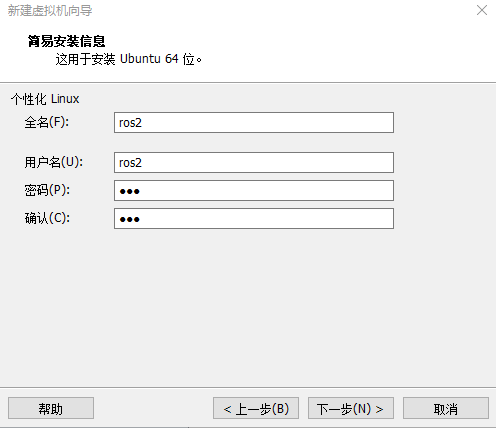
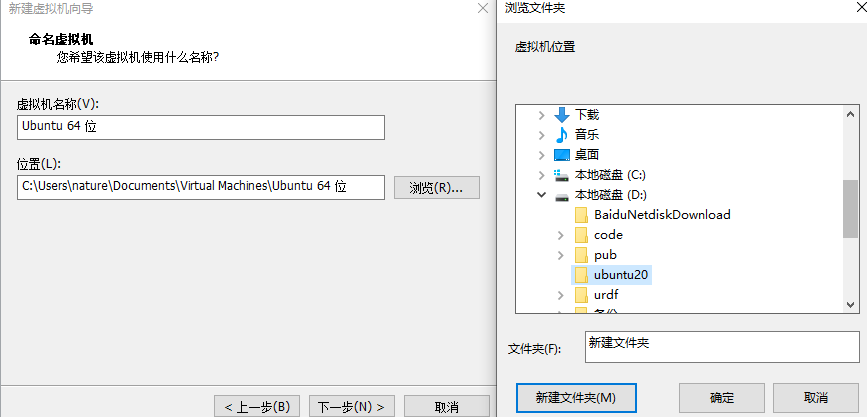
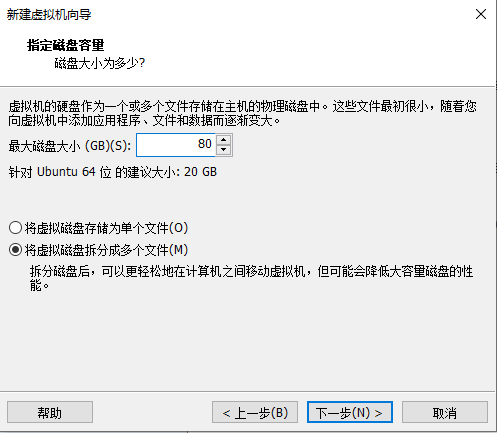
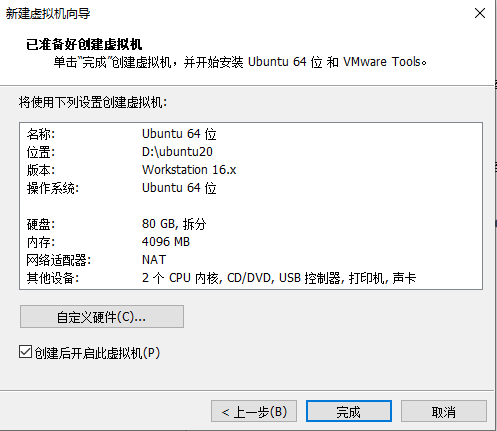
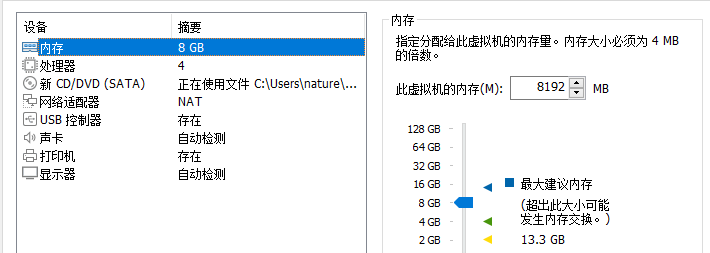
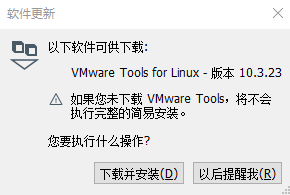
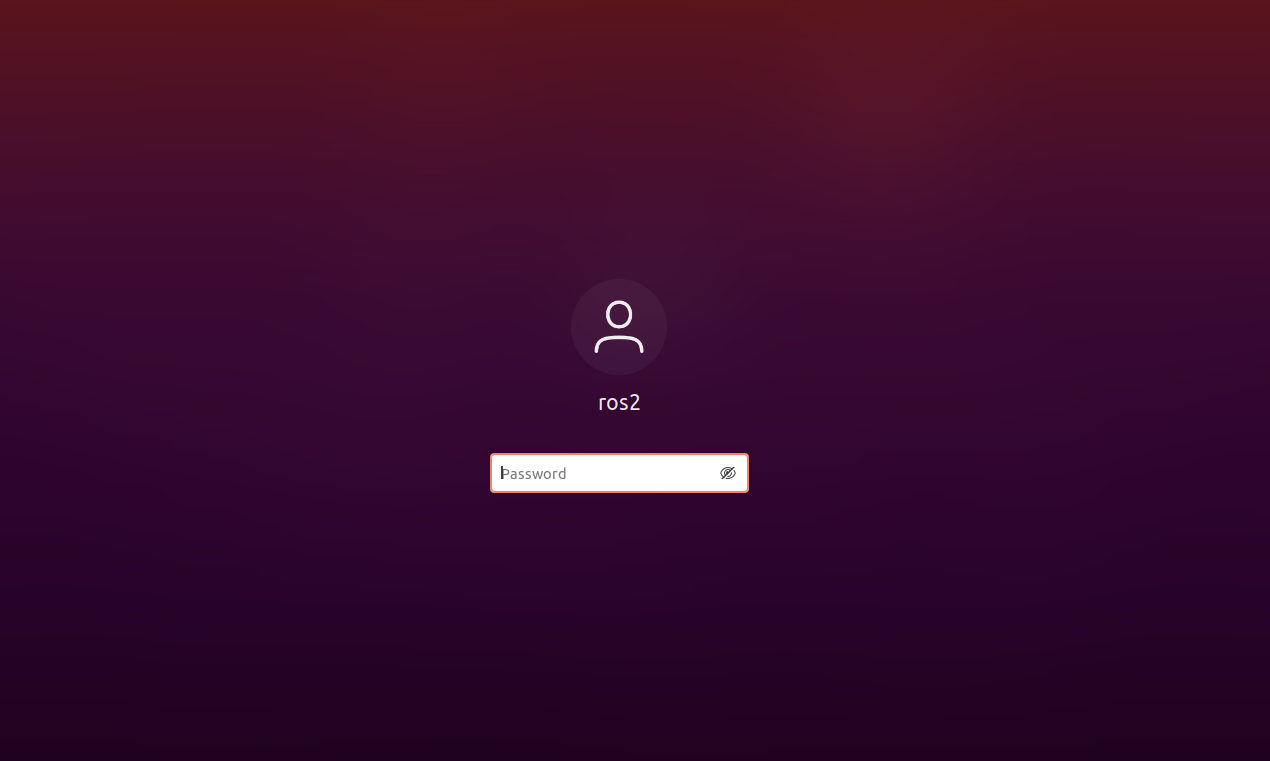
docs/chapt2/2.1系统安装_虚拟机版本.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719182446728.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719182945393.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719184225854.png
{kind=link}

BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719184450785.png
{kind=link}

BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719184758743.png
{kind=link}

BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185440656.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185458219.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185545384.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185556305.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185604490.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185613586.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185625695.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185706443.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185758076.png
{kind=link}

BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185817378.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185845413.png
{kind=link}

BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185912397.png
{kind=link}

BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719185950677.png
{kind=link}

BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719190042507.png
{kind=link}

BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719190205318.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719190240573.png
{kind=link}

BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719191648124.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719191817025.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719191850033.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719191919143.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719192023103.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719192050412.png
{kind=link}

BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210719192549058.png
{kind=link}
BIN
docs/chapt2/2.1系统安装_虚拟机版本/imgs/image-20210720102022189.png
{kind=link}
+ 99
- 0
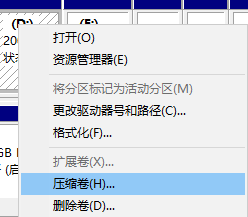
docs/chapt2/2.2系统安装_双系统.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210719193111227.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210719193146900.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210719193223405.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210719193307750.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210719193358390.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210719195021242.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210719195052633.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210720101215192.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210720101307041.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210720101443876.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210720101631507.png
{kind=link}
BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210720101724147.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210720101926724.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210723100051134.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210723100300549.png
{kind=link}

BIN
docs/chapt2/2.2系统安装_双系统/imgs/image-20210723134048243.png
{kind=link}

+ 100
- 0
docs/chapt2/2.3ROS2的安装.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/chapt2/2.3ROS2的安装/imgs/image-20210719200201557.png
{kind=link}

BIN
docs/chapt2/2.3ROS2的安装/imgs/image-20210719205122068.png
{kind=link}

BIN
docs/chapt2/2.3ROS2的安装/imgs/image-20210720102200144.png
{kind=link}

BIN
docs/chapt2/2.3ROS2的安装/imgs/image-20210720102349238.png
{kind=link}

BIN
docs/chapt2/2.3ROS2的安装/imgs/image-20210720102633398.png
{kind=link}

+ 116
- 0
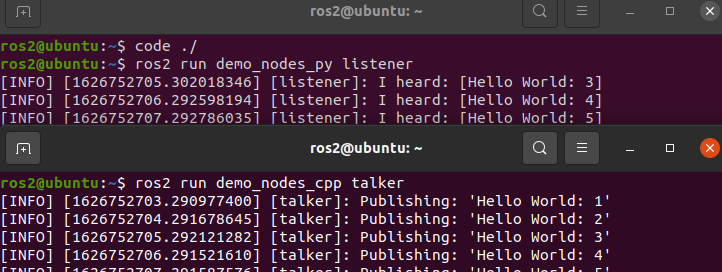
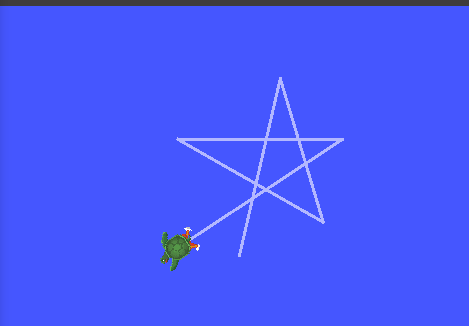
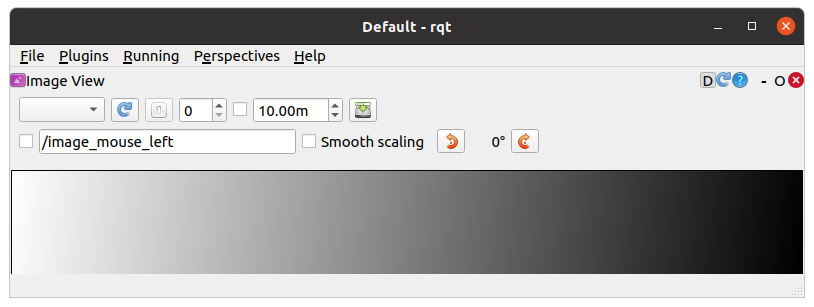
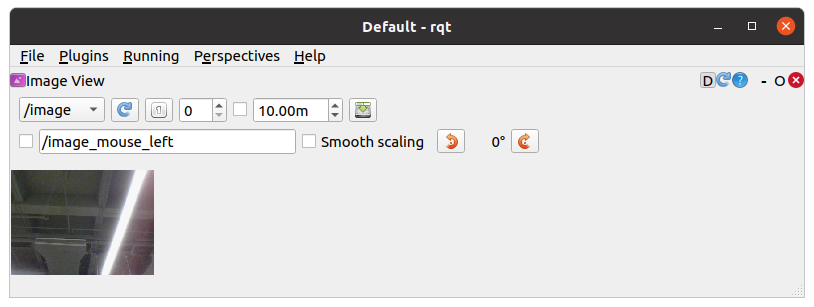
docs/chapt2/2.4动手玩ROS2.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/chapt2/2.4动手玩ROS2/imgs/image-20210720114613697.png
{kind=link}
BIN
docs/chapt2/2.4动手玩ROS2/imgs/image-20210720123734477.png
{kind=link}

BIN
docs/chapt2/2.4动手玩ROS2/imgs/image-20210720124022925.png
{kind=link}

BIN
docs/chapt2/2.4动手玩ROS2/imgs/image-20210720125026860.png
{kind=link}
BIN
docs/chapt2/2.4动手玩ROS2/imgs/image-20210907114613697.png
{kind=link}
BIN
docs/chapt2/2.4动手玩ROS2/imgs/image-20210907123734477.png
{kind=link}
BIN
docs/chapt2/2.4动手玩ROS2/imgs/image-20210907124022925.png
{kind=link}

BIN
docs/chapt2/2.4动手玩ROS2/imgs/image-20210907134048243.png
{kind=link}

+ 157
- 0
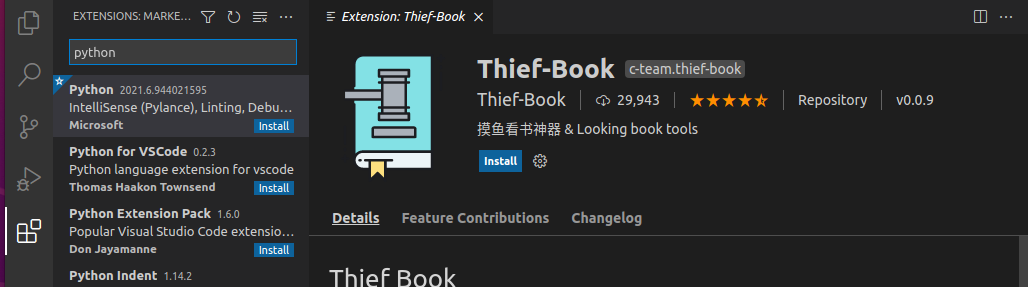
docs/chapt2/2.5VsCode编译器安装与配置.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/chapt2/2.5VsCode编译器安装与配置/imgs/image-20210719194446610.png
{kind=link}

BIN
docs/chapt2/2.5VsCode编译器安装与配置/imgs/image-20210720104733799.png
{kind=link}

BIN
docs/chapt2/2.5VsCode编译器安装与配置/imgs/image-20210720113233035.png
{kind=link}
BIN
docs/chapt2/2.5VsCode编译器安装与配置/imgs/image-20210720113406478.png
{kind=link}
BIN
docs/chapt2/2.5VsCode编译器安装与配置/imgs/image-20210720113510268.png
{kind=link}

BIN
docs/chapt2/2.5VsCode编译器安装与配置/imgs/image-20210720135816630.png
{kind=link}

BIN
docs/chapt2/2.5VsCode编译器安装与配置/imgs/image-20210720135841441.png
{kind=link}

BIN
docs/chapt2/2.5VsCode编译器安装与配置/imgs/image-20210720135911694.png
{kind=link}

BIN
docs/chapt2/2.5VsCode编译器安装与配置/imgs/image-20210720135941635.png
{kind=link}
BIN
docs/chapt2/2.5VsCode编译器安装与配置/imgs/image-20210720140008256.png
{kind=link}