
 鱼香ROS
鱼香ROS
Se han modificado 18 ficheros con 99 adiciones y 35 borrados
+ 17
- 12
docs/_sidebar.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 1
- 1
docs/chapt3/3.7扩展阅读.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 8
- 0
docs/chapt3/分别使用POP和OOP创建穷鬼张三.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 54
- 0
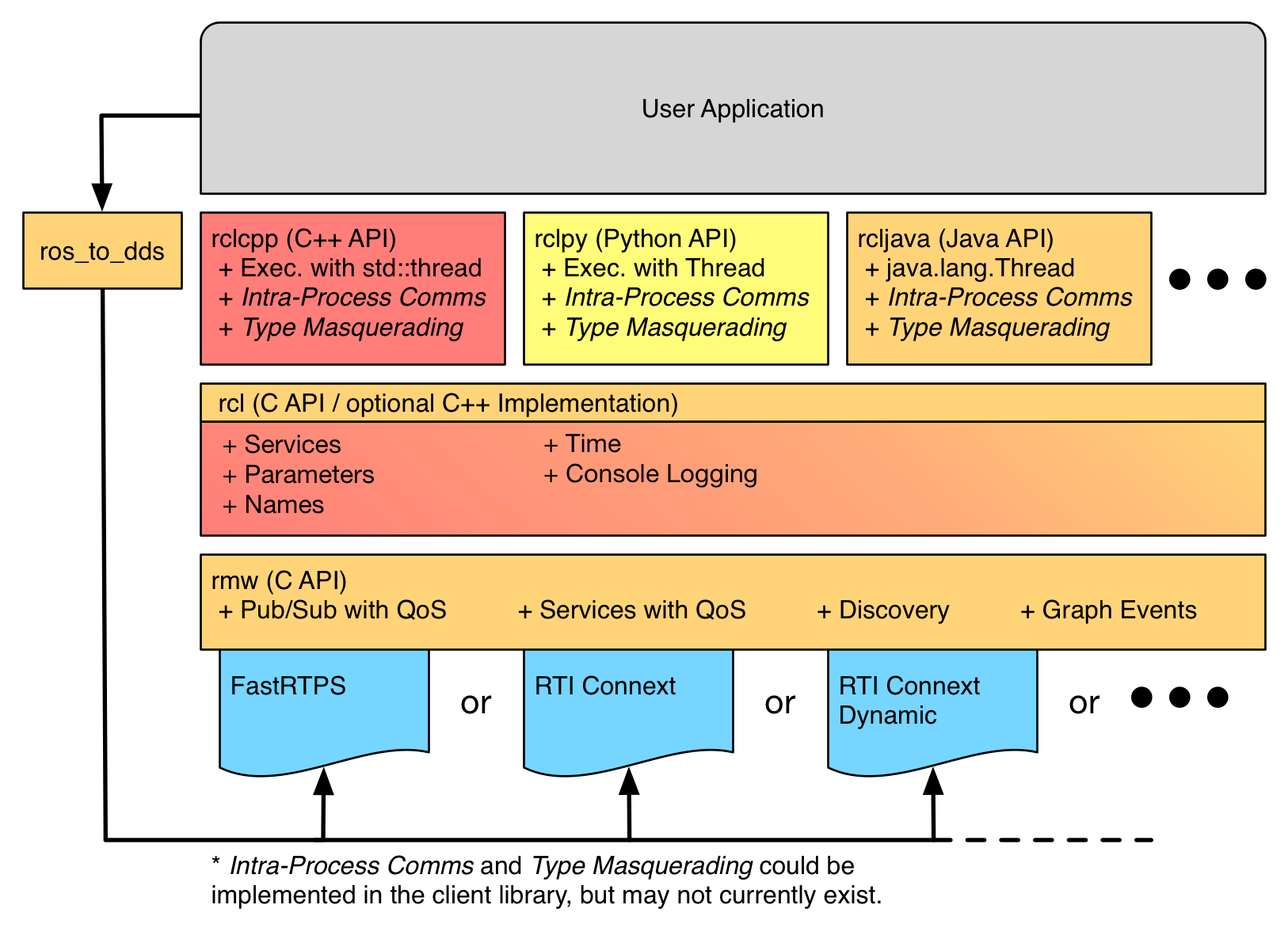
docs/chapt3/扩展阅读2:ROS2客户端库RCL介绍.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/chapt3/扩展阅读ROS2客户端库RCL介绍/imgs/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBA6bG86aaZUk9T,size_20,color_FFFFFF,t_70,g_se,x_16.png
{kind=link}
+ 1
- 1
docs/chapt4/4.10服务实现(C++).md
|
||
|
||
|
||
|
||
|
||
|
||
+ 1
- 1
docs/chapt4/4.11自定义话题通信(python).md
|
||
|
||
|
||
|
||
|
||
|
||
+ 1
- 1
docs/chapt4/4.12话题VS服务.md
|
||
|
||
|
||
|
||
|
||
|
||
+ 1
- 1
docs/chapt4/4.13扩展阅读原始数据类型与包装类型.md
|
||
|
||
|
||
|
||
|
||
|
||
+ 3
- 5
docs/chapt4/4.1ROS2话题介绍.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 4
- 2
docs/chapt4/4.2话题通信实现(Python).md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 1
- 1
docs/chapt4/4.3ROS2话题通信(C++).md
|
||
|
||
|
||
|
||
|
||
|
||
+ 1
- 1
docs/chapt4/4.4话题小练习-李三白嫖.md
|
||
|
||
|
||
|
||
|
||
|
||
+ 2
- 5
docs/chapt4/4.5ROS2通信接口介绍.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 1
- 1
docs/chapt4/4.6ROS2自定义话题接口.md
|
||
|
||
|
||
|
||
|
||
|
||
+ 1
- 1
docs/chapt4/4.7ROS2服务介绍.md
|
||
|
||
|
||
|
||
|
||
|
||
+ 1
- 1
docs/chapt4/4.8自定义服务接口.md
|
||
|
||
|
||
|
||
|
||
|
||
+ 1
- 1
docs/chapt4/4.9服务实现(Python).md
|
||
|
||
|
||
|
||
|
||
|
||