|
|
@@ -68,10 +68,9 @@ intertial标签包含的子标签如下:
|
|
|
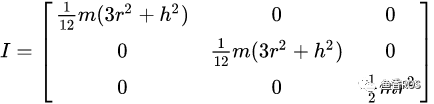
比如我们上一章节的fishbot的轮子和车体,都是实心圆柱,可以采用下面的公式进行计算:
|
|
|
|
|
|
> 注意:这个矩阵是一个对称矩阵,所以只需要通过其上三角即可描述完整描述这个矩阵,所以在URDF中只需要填写六个数字即可。
|
|
|
-
|
|
|
-
|
|
|
-
|
|
|
-
|
|
|
+> 实心圆柱体的惯性矩阵:半径为r,高度为h,质量为m 的实心圆柱体
|
|
|
+> 形状: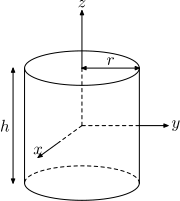
|
|
|
+> 矩阵: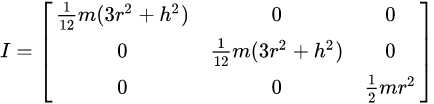
|
|
|
|
|
|
|
|
|
### 1.3 摩擦力和刚性系数
|

 桑欣
桑欣