# 4.3.2 自定义话题接口
本节小鱼带大家一起新建一个消息接口,帮李四的艳娘传奇每一章插入一图。
## 1.如何自定义话题接口
通过前几节的学习大家已经明白,话题是一种单向通信的接口,同一个话题只能由发布者将数据传递给订阅者,所以定义话题接口也只需要定义发布者所要发布的类型即可。
在实际的工程当中,为了减少功能包互相之间的依赖,通常会将接口定义在一个独立的功能包中,所以小鱼会新建一个叫做`village_interfaces`的功能包,并把所有ROS镇下的接口都定义在这个独立的功能包里。
有了功能包之后,我们就可以新建话题接口了,新建方法如下:
- 新建msg文件夹,并在文件夹下新建`xxx.msg`
- 在xxx.msg下编写消息内容并保存
- 在CmakeLists.txt添加依赖和msg文件目录
- 在package.xml中添加xxx.msg所需的依赖
- 编译功能包即可生成python与c++头文件
## 2.开始动手
### 2.1新建工作空间
在town_ws的src文件夹下,运行下面的指令,即可完成`village_interfaces`功能包的创建。
> 注意,这里包的编译类型我们使用ament_cmake方式。
```
ros2 pkg create village_interfaces --build-type ament_cmake
```

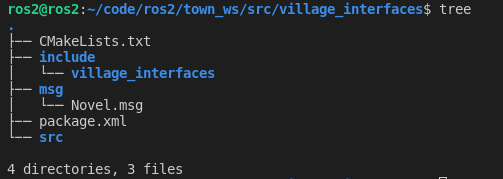
进入`village_interfaces`文件夹,使用tree指令查看,目录结构如下:
### 2.2 新建msg文件夹和Novel.msg(小说消息)
> 大家直接用vscode鼠标新建文件夹和新建文件就行,小鱼写个命令行装一下X
> 注意:msg文件开头首字母一定要大写,ROS2强制要求,原因小鱼盲猜应该是为了和类名保持一致
进入`village_interfaces`下,运行下面的命令:
```
cd village_interfaces
mkdir msg
touch Novel.msg
```
### 2.3编写Novel.msg内容
我们的目的是给李四的小说每一章增加一张图片,原来李四写小说是对外发布一个`std_msgs/msg/String`字符串类型的数据。
而发布图片的格式,我们需要采用ros自带的传感器消息接口中的图片`sensor_msgs/msg/Image`数据类型,所以我们新的消息文件的内容就是将两者合并,在`ROS2`中可以写做这样:
> 在msg文件中可以使用`#`号添加注释。
```
# 标准消息接口std_msgs下的String类型
std_msgs/String content
# 图像消息,调用sensor_msgs下的Image类型
sensor_msgs/Image image
```
这种组合结构图如下:
```mermaid
graph TB;
A[Novel.msg] -->B[std_msgs/String]
A[Novel.msg] -->C[sensor_msgs]
B[std_msgs] -->D[int32]
B[std_msgs/String content] -->G[string]
C[sensor_msgs] -->E[uint8]
C[sensor_msgs] -->G[string]
C[sensor_msgs/Image image] -->F[uint32]
```
这个图一共三层,第一层是消息定义层,第二层是ROS2已有的std_msgs,sensor_msgs,其组成关系是由下一层组合成上一层。
最下面一层`string、uint8、uint32`是ROS2中的原始数据类型,原始数据类型有下面几种,ROS2中所有的接口都是由这些原始数据类型组成。
```
bool
byte
char
float32,float64
int8,uint8
int16,uint16
int32,uint32
int64,uint64
string
```
#### 2.3.1 另一种写法
除了上面一种写法外,还有一种编写方式,那就是采用ROS2的原始类型来组合。
其实很简单,我们不使用std_msgs/String 而是直接使用最下面一层的string。
结构图就变成了这样子:
```mermaid
graph
A[Novel.msg] -->C[sensor_msgs]
A[Novel.msg] -->G[Novel.msg]
C[sensor_msgs] -->G[string]
C[sensor_msgs/Image image] -->F[uint32]
C[sensor_msgs] -->E[uint8]
```
文件内容也变成了这样子:
```
# 直接使用ROS2原始的数据类型
string content
# 图像消息,调用sensor_msgs下的Image类型
sensor_msgs/Image image
```
#### 2.3.2 说明
小鱼是如何知道,std_msgs/String是由基础数据类型string组成的,其实可以通过下面的指令来查看
```
ros2 interface show std_msgs/msg/String
```
结果如下:
```
string data
```
原来std_msgs的String就是包含一个叫变量名为data的string类型变量,这也是在4.2和4.3章节中代码要用`.data`才能拿到真正的数据的原因:
```
from std_msgs.msg import String
msg = String()
msg.data = '第%d回:潋滟湖 %d 次偶遇胡艳娘' % (self.i,self.i)
# msg 是 std_msgs.msg.String() 的对象
# msg.data data是string类型的对象,其定义是string data
```
2.3.3 两种写法选哪一种
小鱼这里选择第二种写法,让大家既了解ROS2的原始数据类型也了解ROS2自带的消息接口包。
所以最后我们的Novel.msg文件内容如下:
```
# 直接使用ROS2原始的数据类型
string content
# 图像消息,调用sensor_msgs下的Image类型
sensor_msgs/Image image
```
### 2.4 修改CMakeLists.txt
完成了代码的编写还不够,我们还需要在`CMakeLists.txt`中告诉编译器,你要给我把Novel.msg转换成Python库和C++的头文件。
大家直接添加下面的代码到`CMakeLists.txt`即可。
```
#添加对sensor_msgs的
find_package(sensor_msgs REQUIRED)
find_package(rosidl_default_generators REQUIRED)
#添加消息文件和依赖
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Novel.msg"
DEPENDENCIES sensor_msgs
)
```
`find_package`用于查找`rosidl_default_generators`位置,下面`rosidl_generate_interfaces`就是声明`msg`文件所属的工程名字、文件位置以及依赖DEPENDENCIES。
> `小鱼踩坑报告`:重点强调一下依赖部分DEPENDENCIES,我们消息中用到的依赖这里必须写上,即使不写编译器也不会报错,直到运行的时候才会出错。
添加完成后的`CMakeLists.txt`长这样

### 2.5修改`package.xml`
修改village_interfaces目录下的`package.xml`,添加下面三行代码,为工程添加一下所需的依赖。
> 这里其实不添加也可以,小鱼后面会跟大家讲一下,packages.xml的作用。
```
sensor_msgs
rosidl_default_generators
rosidl_default_runtime
rosidl_interface_packages
```
添加完成后代码位置在这里。

### 2.6 编译
编译功能包相信大家都很熟悉了,小鱼就不多说了。
回到`town_ws`
```
colcon build --packages-select village_interfaces
```

## 3.验证
写好了自定义的消息,我们如何验证呢?
最好的办法肯定是写上一段代码来测试一下,但因为篇幅原因,小鱼把它放在了本章的最后。
所以我们本节可以通过上节课说过的`ros2 interface`常用的命令来测试。
```
source install/setup.bash
ros2 interface package village_interfaces #查看包下所有接口
ros2 interface show village_interfaces/msg/Novel #查看内容
ros2 interface proto village_interfaces/msg/Novel #显示属性
```

## 4.总结
我们可以在步骤3的运行结果中看到,`Novel`的消息内容是由`content`数据和传感器数据`image`共同组成的了。
通过本节学习,相信你已经学会如何自定义话题了,下一节和小鱼一起认识一下服务吧~