
2.学会使用RVIZ2-TF组件.md 2.0 KB
2.可视化坐标变换
运行上节课的示例,打开终端输入rviz2,打开rviz2,我们尝试在rviz2中直观的看到坐标之间的关系
1.设置默认坐标系
刚打开RVIZ2,你看到的应该是这样一个界面
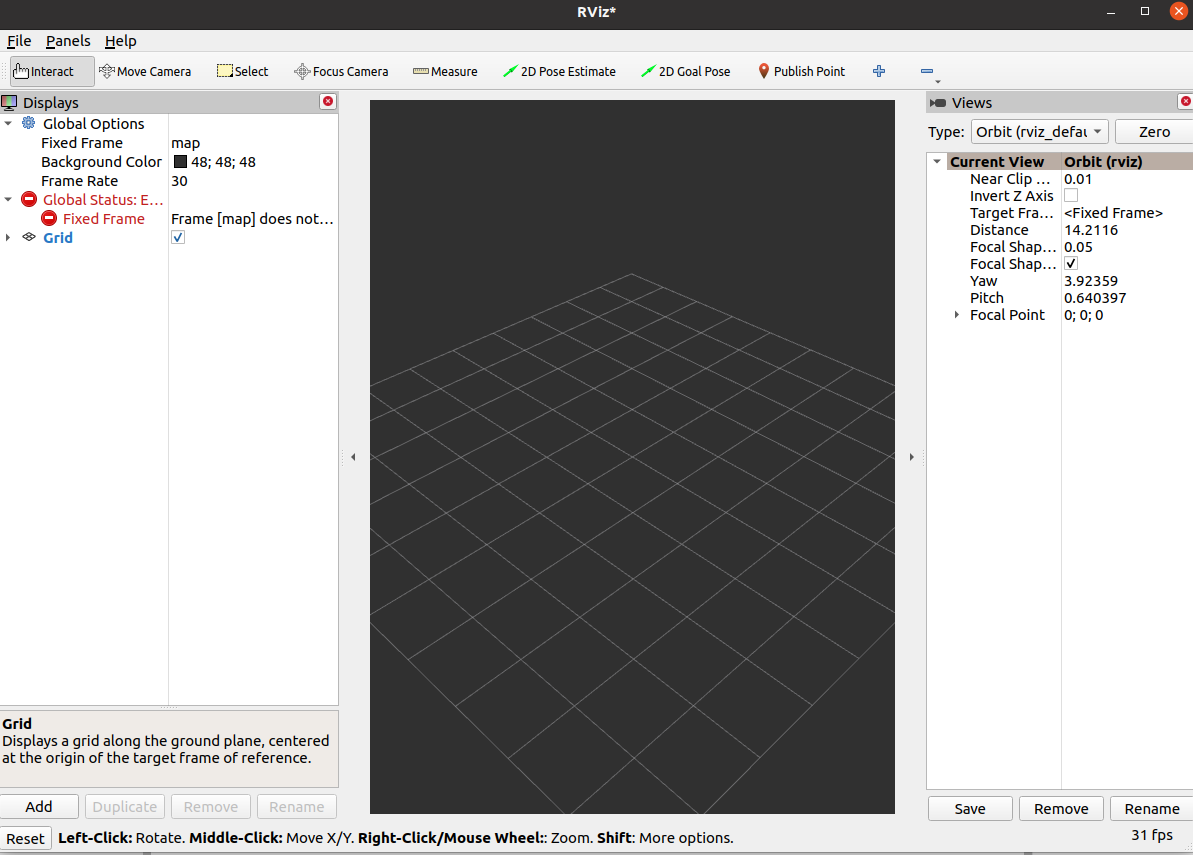 我们可以看到窗口左边的配置选项,全局选项默认选择的FixedFrame为map,这个map就是rviz2默认的坐标系的名字,动动脚趾头想一下我们并没有发布map这个坐标系,所以下面Global Status也是红色的错误。
我们可以看到窗口左边的配置选项,全局选项默认选择的FixedFrame为map,这个map就是rviz2默认的坐标系的名字,动动脚趾头想一下我们并没有发布map这个坐标系,所以下面Global Status也是红色的错误。
此时我们可以手动的修改以下固定的Frame为B,让默认的坐标系设置成机械臂的基坐标系{B}。

设置完成后,错误也没有了,因为此时的ROS2的TF中确确实实找到了一个叫做B的坐标系。
2.添加TF插件
即使没有错误,现在我们还是看不到坐标系,这是为什么呢?在小鱼的动手学ROS2课程当中,小鱼讲过,RVIZ2是一个插件化的软件,所以我们要添加TF相关的插件才能看到TF数据。
点击左下角的Add,在弹出的窗口中选择TF点击OK

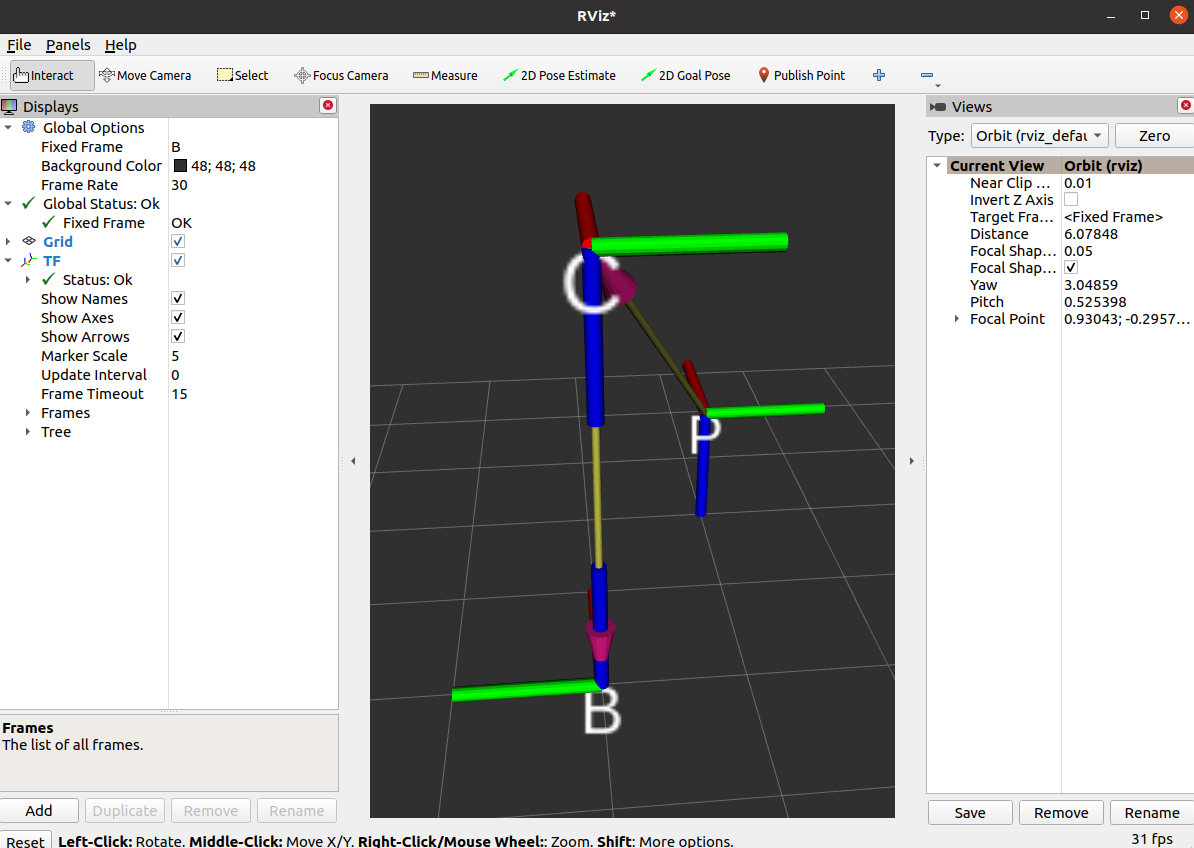
之后你在RVIZ2中就可以看到下图的坐标关系

终于显示出来了,但是没有名字又太小了,修改下左边的选项,勾选Show Names,修改Marker Scale 为5
如果觉得视角不好,可以使用鼠标左键右键以及按下滚轮拖动修改。
技术交流&&问题求助:
- 微信公众号及交流群:鱼香ROS
- 小鱼微信:AiIotRobot
- QQ交流群:139707339
- 版权保护:已加入“维权骑士”(rightknights.com)的版权保护计划