3.使用CMakeLists.txt编译ROS2节点.md 2.5 KB
3.使用CMakeLists.txt编译ROS2节点
虽然通过make调用Makefile编译代码非常的方便,但是还是需要我们手写gcc指令来编译,那有没有什么办法可以自动生成Makefile呢?
答案是有的,那就是cmake工具。
cmake通过调用CMakeLists.txt直接生成Makefile。
1.安装Cmake
sudo apt install cmake
2.新建CMakeLists.txt
在d2lros2/d2lros2/chapt2/basic新建CMakeLists.txt,输入下面内容。
cmake_minimum_required(VERSION 3.22)
project(first_node)
#include_directories 添加特定的头文件搜索路径 ,相当于指定g++编译器的-I参数
include_directories(/opt/ros/humble/include/rclcpp/)
include_directories(/opt/ros/humble/include/rcl/)
include_directories(/opt/ros/humble/include/rcutils/)
include_directories(/opt/ros/humble/include/rcl_yaml_param_parser/)
include_directories(/opt/ros/humble/include/rosidl_runtime_c/)
include_directories(/opt/ros/humble/include/rosidl_typesupport_interface/)
include_directories(/opt/ros/humble/include/rcpputils/)
include_directories(/opt/ros/humble/include/builtin_interfaces/)
include_directories(/opt/ros/humble/include/rmw/)
include_directories(/opt/ros/humble/include/rosidl_runtime_cpp/)
include_directories(/opt/ros/humble/include/tracetools/)
include_directories(/opt/ros/humble/include/rcl_interfaces/)
include_directories(/opt/ros/humble/include/libstatistics_collector/)
include_directories(/opt/ros/humble/include/statistics_msgs/)
# link_directories - 向工程添加多个特定的库文件搜索路径,相当于指定g++编译器的-L参数
link_directories(/opt/ros/humble/lib/)
# add_executable - 生成first_node可执行文件
add_executable(first_node first_ros2_node.cpp)
# target_link_libraries - 为first_node(目标) 添加需要动态链接库,相同于指定g++编译器-l参数
# 下面的语句代替 -lrclcpp -lrcutils
target_link_libraries(first_node rclcpp rcutils)
3.编译代码
我们一般会创建一个新的目录,运行cmake并进行编译,这样的好处是不会显得那么乱。
mkdir build
cd build
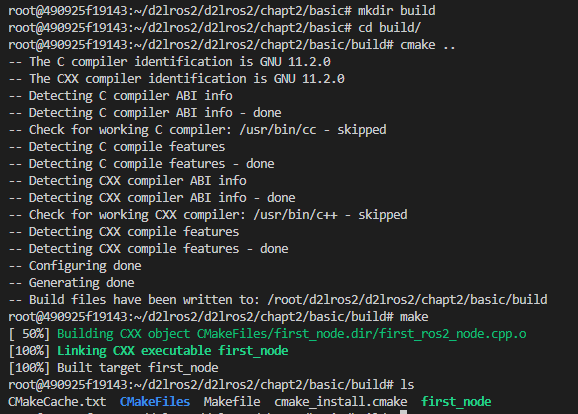
创建好文件夹,接着运行cmake指令,..代表到上级目录找CMakeLists.txt。
cmake ..
运行完cmake你应该可以在build目录下看到cmake自动生成的Makefile了,接着就可以运行make指令进行编译
make
运行完上面的指令,就可以在build目录下发现first_node节点了。