
4.ROS2初体验.md 3.1 KB
4.ROS2初体验
通过几个简单的小例子来体验ROS2软件库和工具集。
1.游戏1:你说我听
游戏内容:很简单,我们启动两个节点,一个节点负责发消息(说),一个节点负责收消息(听)。
启动一个终端Ctrl+Alt+T
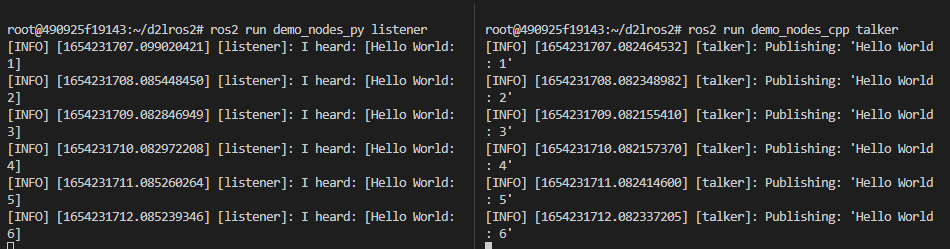
启动倾听者
ros2 run demo_nodes_py listener启动一个新终端Ctrl+Alt+T
启动说话者
ros2 run demo_nodes_cpp talker
观察一下现象,talker节点每数一个数,倾听节点每一次都能听到一个,是不是很神奇。
2.游戏2:涂鸦乌龟
游戏内容:启动海龟模拟器,启动海龟遥控器,控制海龟在地图上画出任意轨迹即可。
本来是控制海龟画个五角星的,但经过手动多次尝试,发现太难了。大家有时间可以试试,有搞定的可以发个图在群里分享一下。
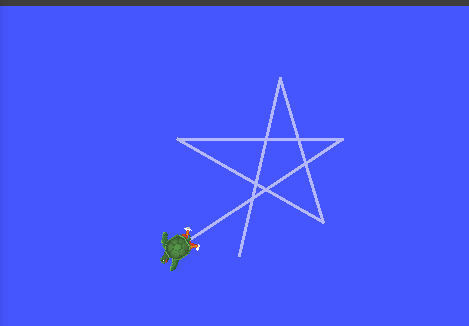
2.1 启动海龟模拟器
打开终端Ctrl+Alt+T,输入下面的指令
ros2 run turtlesim turtlesim_node
就可以看到这样的界面

2.2 启动海龟遥控器
点一下原来的终端输入Ctrl+Shift+T 打开一个新的标签页输入
ros2 run turtlesim turtle_teleop_key
你可以看到这样子的界面

这个时候你就可以使用上下左右去遥控海龟了,快试一试吧。
3. RQT可视化
保持前面两个游戏在运行状态,打开终端,输入rqt。
rqt
打开之后的窗口如下图,空空如也,不要担心,因为我们没有选插件的原因。
选择插件
这里我们可以选择现有的几个RQT插件来试一试,可以看到和话题、参数、服务、动作四大通信组件相关的工具都有,还有一些可视化、日志和系统计算图等相关的。

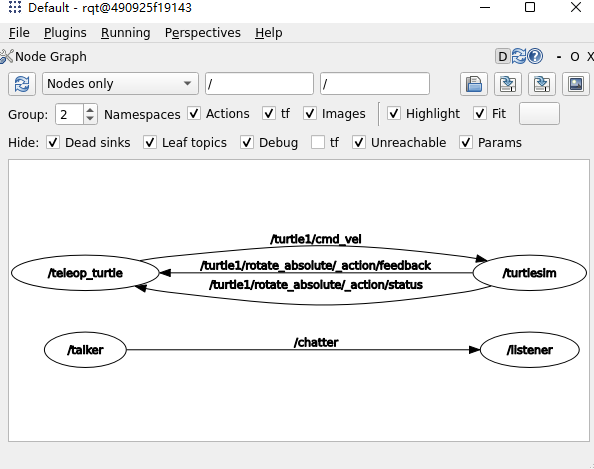
Introspection / Node Graph

打开后就可以看到上面几个节点之间的数据关系了,是不是很方便的工具。
4.总结
通过本节的小游戏,你应该对ROS2稍微熟悉了一丢丢,不过心中也会多出那么几个问题?比如:
为什么一个节点说,一个节点会听到?
为什么键盘可以控制小乌龟前进后退?
没关系,让我们继续往下,你会一点点的有了拨云见月的感觉。
技术交流&&问题求助:
- 微信公众号及交流群:鱼香ROS
- 小鱼微信:AiIotRobot
QQ交流群:139707339
版权保护:已加入“维权骑士”(rightknights.com)的版权保护计划