
2.测量距离学会超声波传感器.md 3.0 KB
2.测量距离学会超声波传感器
你好,我是爱吃鱼香ROS的小鱼。上一节简单的介绍了超声波传感器,但是没有介绍如何通过代码使用,本节我们尝试使用并封装超声波模块。
我们使用的超声波模块一共有四个引脚,分别是
TRIG即发送引脚,用于发送超声波ECHO 即接收引脚,用于接收反射回来的超声波VCC电源接5VGND电源地
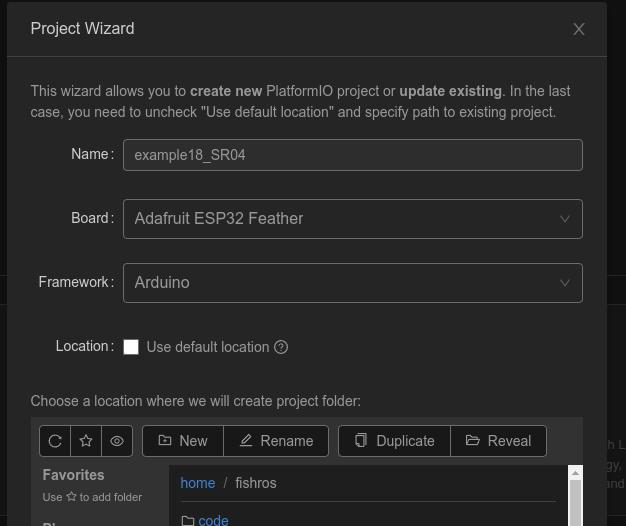
一、新建工程
新建example18_sr04
二、编写代码
带注释的代码如下
#include <Arduino.h>
#define Trig 27 // 设定SR04连接的Arduino引脚
#define Echo 21
void setup()
{
Serial.begin(115200);
pinMode(Trig, OUTPUT); // 初始化舵机和超声波
pinMode(Echo, INPUT); // 要检测引脚上输入的脉冲宽度,需要先设置为输入状态
}
void loop()
{
static double mtime;
digitalWrite(Trig, LOW); // 测量距离
delayMicroseconds(2); // 延时2us
digitalWrite(Trig, HIGH);
delayMicroseconds(10); // 产生一个10us的高脉冲去触发SR04
digitalWrite(Trig, LOW);
mtime = pulseIn(Echo, HIGH); // 检测脉冲宽度,注意返回值是微秒us
float detect_distance = mtime / 58.0 / 100.0; // 计算出距离,输出的距离的单位是厘米cm
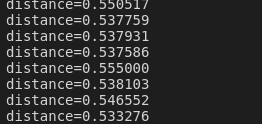
Serial.printf("distance=%f\n", detect_distance);
delay(500);
}
三、代码注解
核心代码分为两部分
3.1发送超声
方波产生,低-高-低
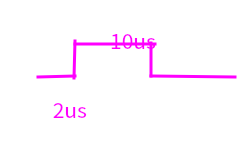
digitalWrite(Trig, LOW); // 测量距离
delayMicroseconds(2); // 延时2us
digitalWrite(Trig, HIGH);
delayMicroseconds(10); // 产生一个10us的高脉冲去触发SR04
digitalWrite(Trig, LOW);
3.2 检测回响计算距离
mtime = pulseIn(Echo, HIGH); // 检测脉冲宽度,注意返回值是微秒us
float detect_distance = mtime / 58.0 / 100.0; // 计算出距离,输出的距离的单位是米m
58是一个时间系数,根据声音在空气中传播速度计算而来。pulseIn函数用于检测某个引脚从当前时间跳变到高电平之间持续的时间。
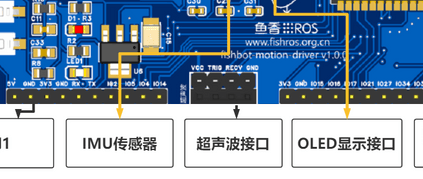
四、下载测试
将超声波模块连接到开发板上的超声波接口上
下载代码,打开串口,查看距离不断变化
五、总结
本节我们成功实现使用超声波实现距离测量功能,下一节我们尝试使用第三方库驱动舵机。