
4.7ROS2服务介绍.md 5.3 KB
4.7 ROS2服务介绍
大家好,帅鱼又蹬蹬蹬的游回来了。本节小鱼将要带大家一起了解一下什么是服务。
还记的ROS镇的外卖服务吗?ROS2镇长上任之后,为了鼓励大家多多运动,就把外卖给取消了。后来镇里又发生了一些有意思的事情。
1.讲个故事
1.1 李三借钱
话说乡村作家李四通过写小说赚了不少钱,李四又是一个心地善良的人,于是他决定无利息借钱给村里的人,帮助大家。
李四三哥李三,比起李四就差太多了,整天游手好闲,除了白嫖李四小说外,听说李四无息对外借钱,就立马想过去捞一笔。但李四对外借钱是有规矩的,规矩如下:
- 借钱一定要打欠条,收到欠条才能给钱
- 每次借钱不能超过自己全部资金的10%且一定是整数,也就是说假如李四现在有100块钱,那么最多借出去
100x10%=10块钱
李三看到之后心想,还要写欠条,那不能借太多,不然以后亲兄弟,明算账起来,自己还不起也不行,于是打算先借10块钱搓一碗麻辣烫去。
1.2 王二与二手书
在李三算计着借钱吃麻辣烫的时候,隔壁王家村王二也在和张家村张三讨价还价着。
原来隔壁张家村穷光蛋张三,想看艳娘传奇,但是买不起正版的,想从王二这边买王二看过的二手书。王二思虑一番后,答应了张三,但他有下面的两点要求:
- 必须一手交钱,一手交货,爱买不买
- 每次给多少钱卖多少章,每章一块钱,如果手里的存货不足,就继续等待
张三一看,虽然一块钱对我来说还是很贵,但想想美腻的艳娘,必须买。
2.服务介绍
看完上面的小故事,我们开始正式介绍一下服务。上面所说的李四对外借钱其实就可以理解为对外提供服务,我们将李四称为服务端,而李三要借李四的钱,李三就称之为客户端。
客户端发送请求给服务端,服务端可以根据客户端的请求做一些处理,然后返回结果给客户端。
graph
A[服务端-李四] --发送响应-借钱结果-->B[客户端-李三]
B[客户端] --发送请求-欠条--> A[服务端]
而王二向张三卖二手的《艳娘传奇》也是服务-客户端模型,王二是提供二手书的服务端,张三是购买二手书的客户端。
不知道你有没有感觉到服务和话题的不同之处,话题是没有返回的,适用于单向或大量的数据传递。而服务是双向的,客户端发送请求,服务端响应请求。
同时服务还是有一些注意事项:
- 同一个服务(名称相同)有且只能有一个节点来提供
- 同一个服务可以被多个客户端调用
放两张官方形象的动图:

3.体验服务
在我们安装ROS2的时候其实系统为我们安装了一些样例程序,其中就有服务使用样例,我们可以先来体验一下。
3.1 启动服务端
打开终端,运行下面的命令,这个命令用于运行一个服务节点,这个服务的功能是将两个数字相加,给定a,b两个数,返回sum也就是ab之和。
ros2 run examples_rclpy_minimal_service service
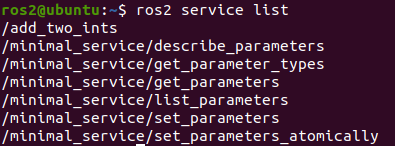
3.2 使用命令查看服务列表
ros2 service list
3.3手动调用服务
再启动一个终端,输入下面的命令(注意a:、b:后的空格)。
ros2 service call /add_two_ints example_interfaces/srv/AddTwoInts "{a: 5,b: 10}"
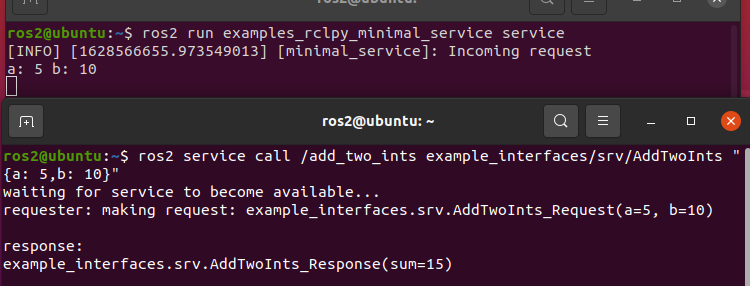
我们可以看到客户端请求两个数字5+10,服务端返回15。
4.ROS2服务常用命令
ROS2的命令行工具,小鱼觉得还是非常值得一学的,毕竟确实很实用(装X),之前已经给大家讲过了关于节点、话题、接口相关的命令了,现在小鱼说一下关于服务的那些命令行。
4.1查看服务列表
ros2 service list

4.2手动调用服务
ros2 service call /add_two_ints example_interfaces/srv/AddTwoInts "{a: 5,b: 10}"

如果不写参数值调用会怎么样?比如下面这种,大家可以尝试下。
ros2 service call /add_two_ints example_interfaces/srv/AddTwoInts
4.3 查看服务接口类型
ros2 service type /add_two_ints

4.4查找使用某一接口的服务
这个命令看起来和4.3刚好相反。
ros2 service find example_interfaces/srv/AddTwoInts

5.总结
本节大家和小鱼一起又多认识了一个小伙伴,ROS2的服务。
下一节,我们将从自定义服务接口开始,帮助李三借钱吃麻辣烫,帮助张三看上二手书。