
10.4Cartographer介绍与安装.md 4.2 KB
10.4 Cartographer介绍与安装
1.Cartographer介绍
Cartographer是Google开源的一个可跨多个平台和传感器配置以2D和3D形式提供实时同时定位和建图(SLAM)的系统。
github地址:https://github.com/cartographer-project/cartographer 文档地址:https://google-cartographer.readthedocs.io/en/latest
在小鱼呆过的机器人公司里,建图最终方案都是采用了Cartographer,甚至花费大量人力物力对Cartographer算法进行裁剪,这足以表明Cartographer算法的优越性。
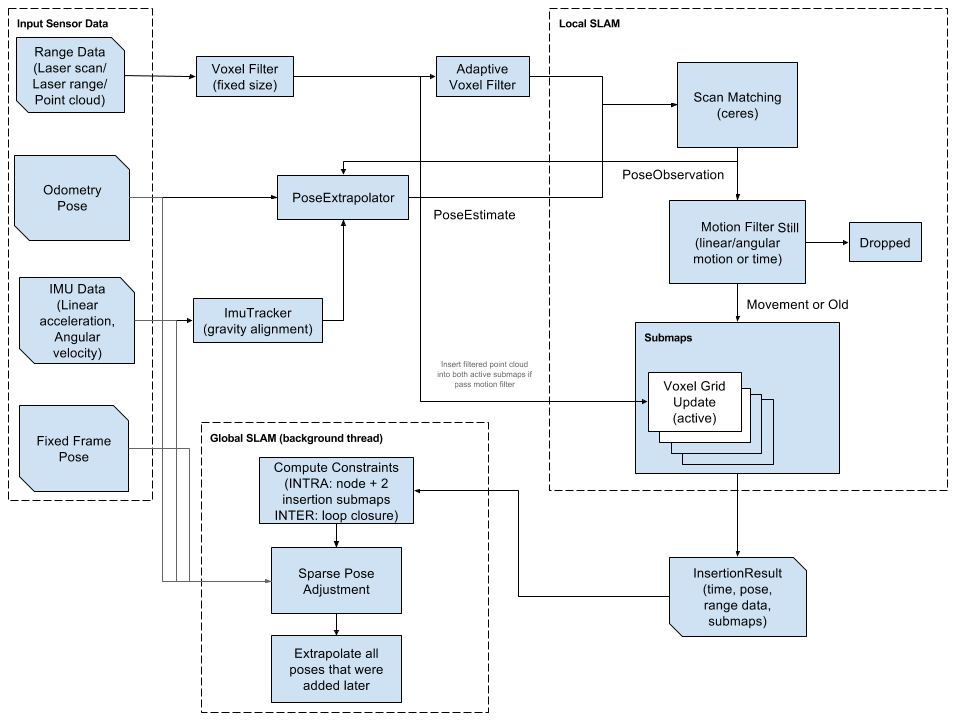
Cartographer系统架构概述(简单看看即可,如果大家后面确定研究方向是SLAM可以深入学习):
简单的可以看到左边的可选的输入有深度信息、里程计信息、IMU数据、固定Frame姿态。
2.Carttographer安装
2.1 apt安装
安装carotgrapher
sudo apt install ros-foxy-cartographer
需要注意我们不是直接使用cartographer,而是通过cartographer-ros功能包进行相关操作,所以我们还需要安装下cartographer-ros
sudo apt install ros-foxy-cartographer-ros
2.2 源码安装
小鱼比较推荐源码安装的方式,毕竟是以学习为目的,我们后面要稍微看一下源码。
将下面的源码克隆到fishbot_ws的src目录下新建一个文件夹cartographer_core,在终端打开文件夹,克隆代码:
git clone https://ghproxy.com/https://github.com/ros2/cartographer.git -b foxy
git clone https://ghproxy.com/https://github.com/ros2/cartographer_ros.git -b dashing
安装依赖
这里我们使用rosdepc进行依赖的安装,rosdepc指令找不到可以先运行下面的一键安装命令,选择一键配置rosdep即可。
wget http://fishros.com/install -O fishros && . fishros
接着在fishbot_ws下运行下面这个命令进行依赖的安装。
rosdepc install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
编译
这里有一个新的命令--packages-up-to,意思是其所有依赖后再编译该包
colcon build --packages-up-to cartographer_ros
2.3 测试是否安装成功
如果是源码编译请先source下工作空间后再使用下面指令查看是否安装成功;
ros2 pkg list | grep cartographer
能看到下面的结果即可
cartographer_ros
cartographer_ros_msgs
可能你会好奇为什么没有cartographer,因为cartographer包的编译类型原因造成的,不过没关系,cartographer_ros依赖于cartographer,所以有cartographer_ros一定有cartographer。
3.Cartographer参数配置
作为一个优秀的开源库,Cartographer提供了很多可以配置的参数,虽然灵活性提高了,但同时也提高了使用难度(需要对参数进行调节配置),所以有必要在正式使用前对参数进行基本的介绍。
因为我们主要使用其进行2D的建图定位,所以我们只需要关注2D相关的参数。
Cartographer参数是使用lua文件来描述的,不会lua也没关系,我们只是改改参数而已。
3.1 轨迹构建参数
文件:trajectory_builder_2d
src/cartographer_core/cartographer/configuration_files/trajectory_builder_2d.lua
请你打开这个文件自行浏览,小鱼对其中我们可能会在初次建图配置的参数进行介绍。
-- 是否使用IMU数据
use_imu_data = true,
-- 深度数据最小范围
min_range = 0.,
-- 深度数据最大范围
max_range = 30.,
-- 传感器数据超出有效范围最大值时,按此值来处理
missing_data_ray_length = 5.,
4.总结
本节我们简单的介绍了Cartographer以及二进制和源码安装的方法,下一节我们就开始为fishbot配置cartographer,接着就可以使用fishbot进行建图了。
技术交流&&问题求助:
- 微信公众号及交流群:鱼香ROS
- 小鱼微信:AiIotRobot
QQ交流群:139707339
版权保护:已加入“维权骑士”(rightknights.com)的版权保护计划