
2.中间件DDS架构.md 4.1 KB
2.ROS2中间件DDS架构
本文主要带你了解DDS是什么、ROS2使用DDS所带来的优缺点,以及ROS2为了让DDS在机器人开发上变得简单做了哪些努力。
1. 中间件
1.1 中间件是什么
顾名思义
中间件就是介于某两个或者多个节点中间的组件。干嘛用的呢?
就是提供多个节点中间通信用的。
官方解释就比较玄乎了:
中间件是一种独立的系统软件或服务程序,分布式应用软件借助这种软件在不同的技术之间共享资源。中间件位于客户机/ 服务器的操作系统之上,管理计算机资源和网络通讯。是连接两个独立应用程序或独立系统的软件。相连接的系统,即使它们具有不同的接口,但通过中间件相互之间仍能交换信息。执行中间件的一个关键途径是信息传递。通过中间件,应用程序可以工作于多平台或OS环境。
小鱼看完表示

1.2 ROS中间件VS ROS2中间件
话不多说先上图

ROS/ROS2中间件对比
此图来自论文Exploring the Performance of ROS2,小鱼已经收录到了公众号
1.2.1 ROS1中间件
ROS1的中间件是ROS组织自己基于TCP/UDP机制建立的,为了维护该部分ROS1组织花费了大量的精力,但是依然存在很多问题。
1.2.2 ROS2中间件
ROS2采用了第三方的DDS作为中间件,将DDS服务接口进行了一层抽象,保证了上层应用层调用接口的统一性。
基于DDS的互相发现协议,ROS2终于干掉了ROS1中的Master节点。
2. DDS和ROS2架构
ROS2为每家DDS供应商都开发了对应的DDS_Interface即DDS接口层,然后通过DDS Abstract抽象层来统一DDS的API。

ROS2架构中的DDS部分

3. DDS 通信模型
DDS的模型是非常容易理解,我们可以定义话题的数据结构(类似于ROS2中的接口类型)。下图中的例子:
- Pos:一个编号id的车子的位置x,y
DDS的参与者(Participant)通过发布和订阅主题数据进行通信。
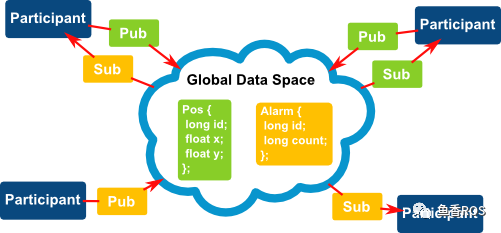
DDS的应用层通过DDS进行数据订阅发布,DDS通过传输层进行数据的收发。

4. DDS的优势与劣势
4.1 优势
- 发布/订阅模型:简单解耦,可以轻松实现系统解耦
- 性能:在发布/订阅模式中,与请求/回复模式相比,延迟更低,吞吐量更高。
- 远程参与者的自动发现:此机制是 DDS 的主要功能之一。通信是匿名的、解耦的,开发者不必担心远程参与者的本地化。
- 丰富的 Qos 参数集,允许调整通信的各个方面:可靠性、持久性、冗余、寿命、传输设置、资源......
- 实时发布订阅协议 ( RTPS ):该协议几乎可以通过任何传输实现,允许在 UDP、TCP、共享内存和用户传输中使用 DDS,并实现不同 DDS 实现之间的真正互操作性。
4.2 劣势
- API复杂,DDS 的灵活性是以复杂性为代价的。
- 系统开销相对较大,小鱼实际体会,待数据论证。
- 社区支持问题,但ROS2近两年来使用DDS后社区表现还是不错的。
5. ROS2使用DDS的几个理由
- DDS已经应用在军事、潜艇各个领域,稳定性实时性经过实际检验。
- 使用DDS需要维护的代码要少得多,可以让ROS2开发人员腾出手专注机器人开发。
- DDS有定义好的行为和规范并且有完善的文档。
- DDS提供了推荐的用例和软件API,有较好的语言支持。
技术交流&&问题求助:
- 微信公众号及交流群:鱼香ROS
- 小鱼微信:AiIotRobot
QQ交流群:139707339
版权保护:已加入“维权骑士”(rightknights.com)的版权保护计划