
5.3使用C++玩转参数.md 5.0 KB
5.3使用C++玩转参数
大家好,我是小鱼,本节课带大家一起学习如何使用C++来对参数进行操作。
本节课的任务是通过参数实现动态调整王二卖二手书的价格。
1.编写代码
打开village_wang下的wang2.cpp,我们可以看到王二节点同样是继承于rclcpp:Node的,因此王二也具备了操作参数的能力。
class SignalDogNode : public rclcpp::Node
| 函数名称 | 描述 |
|---|---|
| declare_parameter | 声明和初始化一个参数 |
| declare_parameters | 声明和初始化一堆参数 |
| get_parameter | 通过参数名字获取一个参数 |
| get_parameters | 获取具有给定前缀的所有参数的参数值 |
| set_parameters | 设置一组参数的值 |
| 更多函数 | rclcpp: rclcpp:Node |
完成王二卖书章节价格的参数,我们只需要做两步即可,声明参数和获取参数
1.1 声明参数
首先在Wang2的private中声明一个章节单价,默认值是1,代表一元一章。
//声明一下书的单价
unsigned int novel_price = 1;
然后在构造函数中声明参数
//声明参数
this->declare_parameter<std::uint32_t>("novel_price", novel_price);
1.2 获取并设置参数
最后在收到买书请求回调函数中sell_book_callback调更新并使用该参数
//更新参数
this->get_parameter("novel_price",novel_price);
unsigned int novelsNum = int( request->money / novel_price ); //应给小说数量,一块钱一章
修改完成后的新增的SignalDogNode代码如下:
class SignalDogNode : public rclcpp::Node
{
public:
// 构造函数
SignalDogNode(std::string name) : Node(name)
{
//声明参数
this->declare_parameter<std::int32_t>("novel_price", novel_price);
}
private:
//声明一下书的单价
unsigned int novel_price = 1;
// 声明一个回调函数,当收到买书请求时调用该函数,用于处理数据
void sell_book_callback(const village_interfaces::srv::SellNovel::Request::SharedPtr request,
const village_interfaces::srv::SellNovel::Response::SharedPtr response)
{
//更新参数
this->get_parameter("novel_price",novel_price);
unsigned int novelsNum = int( request->money / novel_price ); //应给小说数量,钱/小说章节单价=章节数
};
2.测试
2.1编译程序
colcon build --packages-select village_wang
2.2 运行节点
2.2.1 运行王二节点
source install/setup.bash
ros2 run village_wang wang2_node

2.2.2 运行李四写书
source install/setup.bash
ros2 run village_li li4_node
2.2 运行李四节点
ros2 run village_li li4_node
2.3 使用ros2 param命令行测试
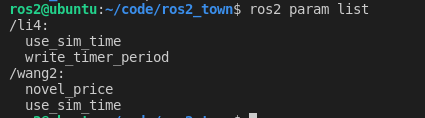
2.3.1 查看参数列表
ros2 param list
2.3.2 查看描述
ros2 param describe /wang2 novel_price

2.3.3 获取参数值
ros2 param get /wang2 novel_price

2.3.4 设置参数值提高价钱
这里设置成2,将小说的价钱涨到2元一章,然后我们启动张三,看一下张三能够买到几本小说
ros2 param set /wang2 novel_price 2

运行张三节点,可以看到张三最终只收到了两章小说,
source install/setup.bash
ros2 run village_zhang zhang3_node
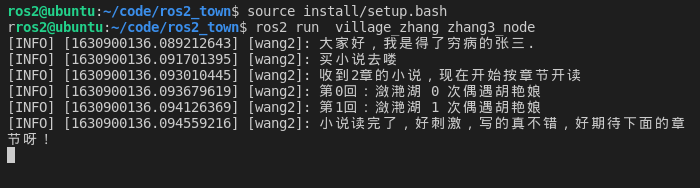
可以看到,花了5块钱的张三只买到了两章小说,CPI又上涨了~
3.总结
通过本节的学习,我们已经完成了ROS2中参数的基本使用,更多的姿势还需你在实践中探索和发现,也可以通过官方文档进行学习。