4.进行单点与路点导航.md 2.3 KB
4.进行单点与路点导航
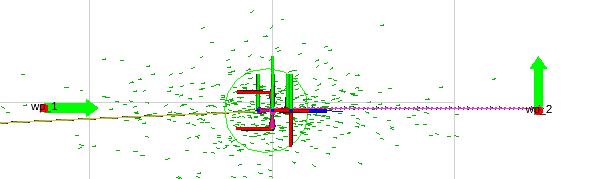
简单了解下地图结构,我们可以使用 Nav2 Goal 按钮给定目标点,让机器人自主进行导航。点击该工具,选择一个目标位置和朝向,就可以看到规划出来的全局路径,并且机器人已经开始移动了。
如果在机器人移动的过程中,放大图像,你将看到如下图所示的一条很短的蓝色线条,这个线条就是局部路径规划的结果。
接着我们来测试指定路点的导航,路点就是指路过的点,比如你要从家前往学校可以有多个路线,但你希望可以经过某家店买些东西,就可以指定要经过这家店。使用路点导航,Navigation 2 就会在规划路径按照你指定的顺序进行导航。
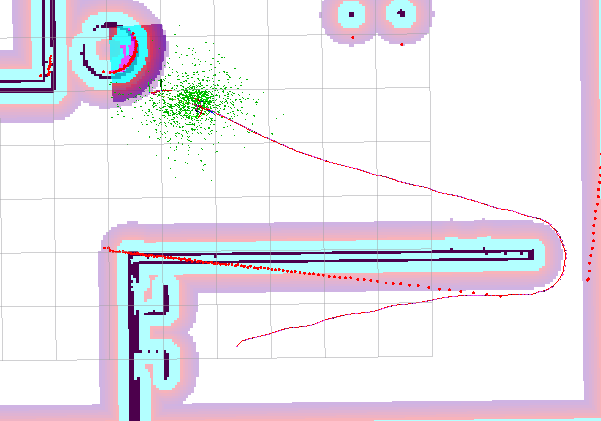
通过这个插件可以取消导航任务,也可以设置多个目标点的导航,点击最下面的 Waypoint/Nav Through Poses Mode ,接着使用 Nav2 Goal 依次设置多个路点,比如下图中设置了五个路点,让机器人绕过咖啡桌再到左前方的目标点。
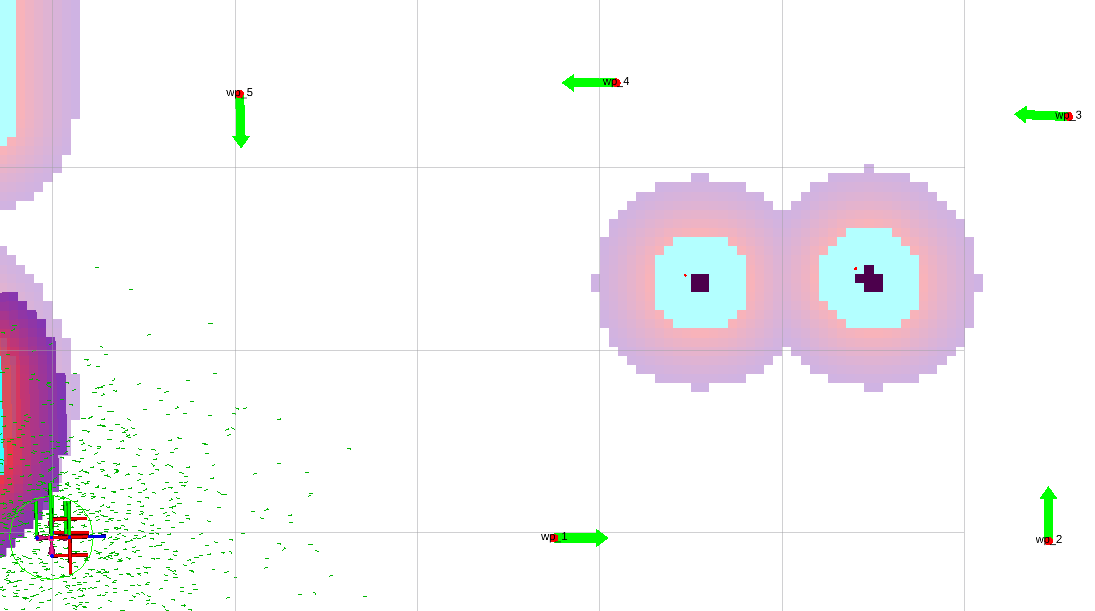
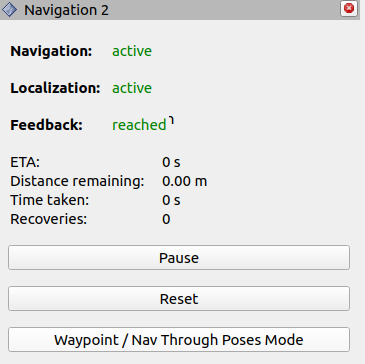
设置完成后,就可以开启路点导航了。如下图所示在 RViz 的左下角的窗口上有三个按钮,点击最下面一个 Start Waypoint Follwing 就可以启动路点导航。

接着就可以看到机器人依次走向每一个目标点了,行走路径如下图所示。