鱼香ROS
鱼香ROS
100 changed files with 2320 additions and 22 deletions
+ 23
- 18
docs/_sidebar.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 9
- 4
docs/foxy/chapt7/7.1.1数学基础.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 248
- 0
docs/humble/chapt6/basic/1.矩阵与矩阵运算.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 184
- 0
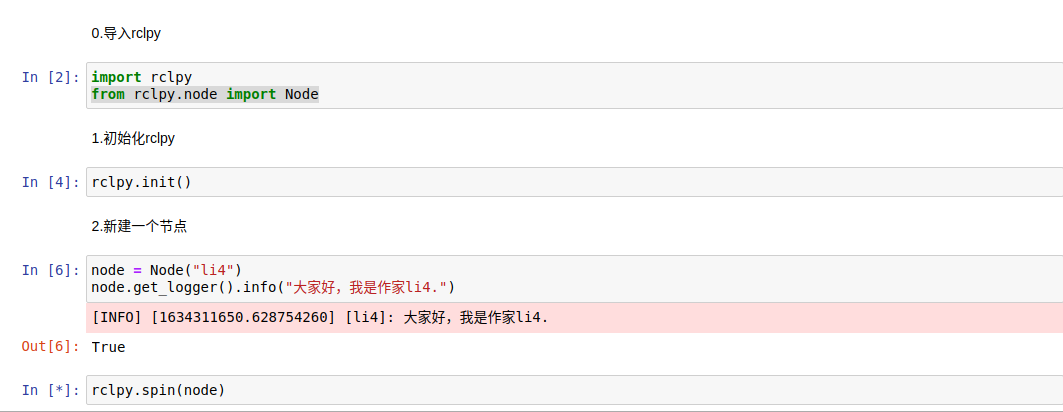
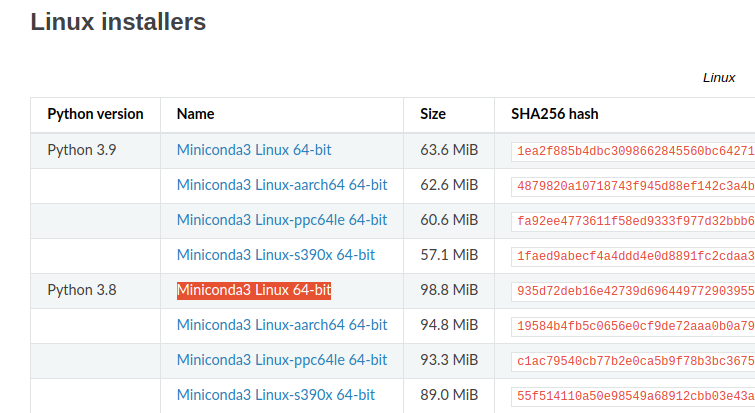
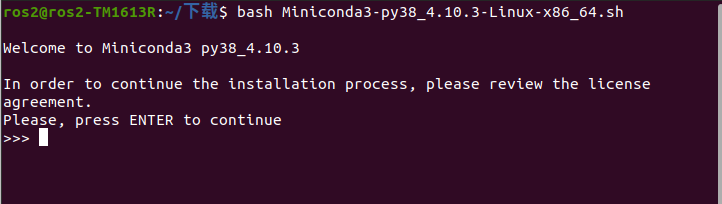
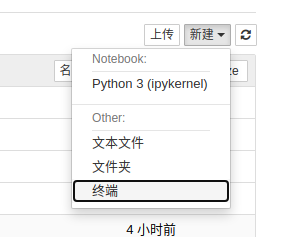
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/156096c7220641e193eb4120bf6529f2.png
{kind=link}
BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/2b7b5d46297f417d8193c15ade9703aa.png
{kind=link}

BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/395a98223c2a4f879a7775e222b306c8.png
{kind=link}

BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/6100b4f6bff0418faead3cf324f79d96.png
{kind=link}

BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/68fd19a405984074bb66f252b1768b1a.png
{kind=link}
BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/79fc43950de34915ad38d209f71af3cb.png
{kind=link}
BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/8280c3a01583481dbe5a8248391d5448.png
{kind=link}

BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/975648e46abd4fd0932c25668aa01521.png
{kind=link}

BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/a37fb5886320420c8a008b41f5570326.png
{kind=link}

BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/a7a988ae701b425589bdcd127b472731.png
{kind=link}
BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/cc7b32eb5290421998ffbb195bccd32d.png
{kind=link}
BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/d0712dc35c0b4ef7b06e24409f962c3a.png
{kind=link}
BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/f4f899e96b3c4fd1bb525aff1cc1a81e.png
{kind=link}

BIN
docs/humble/chapt6/basic/2.MiniConda与Jupyter介绍安装/imgs/fa57ec6d47b64b938d5e6aee7e880353.png
{kind=link}
+ 205
- 0
docs/humble/chapt6/basic/3.矩阵运算实战.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/0253b1c32a744498afc749c6409ff400.png
{kind=link}

BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/2a011b6a2b6a43ae80d445e79e912e4b.png
{kind=link}
BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/4fcc0b302fcf4ab2ac8539a4699da92d.png
{kind=link}

BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/913e42cdf6de44fa9d0a80db02d581d8.png
{kind=link}
BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/9164b1c685724ffb8047859f5b0973c7.png
{kind=link}
BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/9a640b126bcd48bfa9f7d8d1ff7ac866.png
{kind=link}

BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/9bcbc212d6af415cafe490fd3dd95b44.png
{kind=link}
BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/b3f97d2505804be8a9420969ca382826.png
{kind=link}

BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/b7f383304214422cb9320680ac35d6ef.png
{kind=link}
BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/c20c804d3c594267a7cd359afe321221.png
{kind=link}

BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/c979e2884b7f40d28b49dfd195adbcd3.png
{kind=link}
BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/fee1809105154a88a37229de406bc017.png
{kind=link}

BIN
docs/humble/chapt6/basic/3.矩阵运算实战/imgs/image-20220216115928.PNG
{kind=link}
+ 374
- 0
docs/humble/chapt6/get_started/1.空间坐标描述.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt6/get_started/1.空间坐标描述/imgs/format,f_auto.png
{kind=link}

BIN
docs/humble/chapt6/get_started/1.空间坐标描述/imgs/image-20211102151409351.png
{kind=link}
BIN
docs/humble/chapt6/get_started/1.空间坐标描述/imgs/image-20211102153515882.png
{kind=link}

BIN
docs/humble/chapt6/get_started/1.空间坐标描述/imgs/image-20211104102656102.png
{kind=link}

BIN
docs/humble/chapt6/get_started/1.空间坐标描述/imgs/image-20211104110930303.png
{kind=link}

BIN
docs/humble/chapt6/get_started/1.空间坐标描述/imgs/image-20211104115451563.png
{kind=link}
BIN
docs/humble/chapt6/get_started/1.空间坐标描述/imgs/image-20211104160047629.png
{kind=link}

BIN
docs/humble/chapt6/get_started/1.空间坐标描述/imgs/image-20211104160841318.png
{kind=link}
BIN
docs/humble/chapt6/get_started/1.空间坐标描述/imgs/image-20211104162846579.png
{kind=link}
BIN
docs/humble/chapt6/get_started/1.空间坐标描述/imgs/image-20211105104937239.png
{kind=link}
BIN
docs/humble/chapt6/get_started/1.空间坐标描述/imgs/image-20211108213832470.png
{kind=link}
+ 164
- 0
docs/humble/chapt6/get_started/2.空间坐标描述实战.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt6/get_started/2.空间坐标描述实战/imgs/image-20211104102656102.png
{kind=link}

BIN
docs/humble/chapt6/get_started/2.空间坐标描述实战/imgs/image-20211105102418250.png
{kind=link}

BIN
docs/humble/chapt6/get_started/2.空间坐标描述实战/imgs/image-20211105102746824.png
{kind=link}

BIN
docs/humble/chapt6/get_started/2.空间坐标描述实战/imgs/image-20211105110244694.png
{kind=link}

BIN
docs/humble/chapt6/get_started/2.空间坐标描述实战/imgs/image-20211108213832470.png
{kind=link}

BIN
docs/humble/chapt6/get_started/2.空间坐标描述实战/imgs/image-20211108224851838.png
{kind=link}

BIN
docs/humble/chapt6/get_started/2.空间坐标描述实战/imgs/image-20211108231029275.png
{kind=link}

+ 337
- 0
docs/humble/chapt6/get_started/3.姿态的多种表示.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt6/get_started/3.姿态的多种表示/imgs/1d478c77e59d4e93a42ae944ea6bd3a9.png
{kind=link}

BIN
docs/humble/chapt6/get_started/3.姿态的多种表示/imgs/808db9fe269b4684bc0537e3154f2a32.gif
{kind=link}
BIN
docs/humble/chapt6/get_started/3.姿态的多种表示/imgs/a8faaa8c30654a39a62a4b05fb276b60.png
{kind=link}

BIN
docs/humble/chapt6/get_started/3.姿态的多种表示/imgs/b36d9d33b5ae47bfb3759556f10fd70f.png
{kind=link}

BIN
docs/humble/chapt6/get_started/3.姿态的多种表示/imgs/fa42e7371bf84f848eaf55c4406699b5.gif
{kind=link}
BIN
docs/humble/chapt6/get_started/3.姿态的多种表示/imgs/image-20211229184338075.png
{kind=link}
BIN
docs/humble/chapt6/get_started/3.姿态的多种表示/imgs/image-20211229184439675.png
{kind=link}
BIN
docs/humble/chapt6/get_started/3.姿态的多种表示/imgs/image-20211229184453523.png
{kind=link}
BIN
docs/humble/chapt6/get_started/3.姿态的多种表示/imgs/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA6bG86aaZUk9T,size_20,color_FFFFFF,t_70,g_se,x_16.png
{kind=link}

+ 142
- 0
docs/humble/chapt6/get_started/4.姿态转换实战.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt6/get_started/4.姿态转换实战/imgs/image-20211230112734251.png
{kind=link}
+ 98
- 0
docs/humble/chapt6/get_started/5.齐次坐标变换.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 241
- 0
docs/humble/chapt6/get_started/6.齐次坐标变换实战.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20211104102656102.png
{kind=link}
BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20211108213832470.png
{kind=link}

BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220104124632233.png
{kind=link}
BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220104124645988.png
{kind=link}

BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220104124655166.png
{kind=link}

BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220104124708934.png
{kind=link}
BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220108161652509.png
{kind=link}

BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220108161712715.png
{kind=link}
BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220108162303105.png
{kind=link}

BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220108162310322.png
{kind=link}
BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220108162328993.png
{kind=link}
BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220108162339874.png
{kind=link}
BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220108163802318.png
{kind=link}

BIN
docs/humble/chapt6/get_started/6.齐次坐标变换实战/imgs/image-20220108174934212.png
{kind=link}
+ 119
- 0
docs/humble/chapt6/get_started/7.机器人运动学介绍.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt6/get_started/7.机器人运动学介绍/imgs/OIP-C.kPisImqMhOUrt0gstMeUMAHaEv
BIN
docs/humble/chapt6/get_started/7.机器人运动学介绍/imgs/image-20220108223220972.png
{kind=link}

BIN
docs/humble/chapt6/get_started/7.机器人运动学介绍/imgs/image-20220108223512852.png
{kind=link}
BIN
docs/humble/chapt6/get_started/7.机器人运动学介绍/imgs/image-20220308230020572.png
{kind=link}

+ 176
- 0
docs/humble/chapt7/get_started/1.TF2介绍.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt7/get_started/1.TF2介绍/imgs/6b0d8be89ab04fbd8d82e9cea3d882c8.png
{kind=link}

BIN
docs/humble/chapt7/get_started/1.TF2介绍/imgs/6c85c97787474091acda23a39a66f9d1.png
{kind=link}
BIN
docs/humble/chapt7/get_started/1.TF2介绍/imgs/820a681b891a4719867e0c84a492d85f.png
{kind=link}

BIN
docs/humble/chapt7/get_started/1.TF2介绍/imgs/82291e00c53c4711b6328cc4b3a9ce90.png
{kind=link}

BIN
docs/humble/chapt7/get_started/1.TF2介绍/imgs/image-20220125112120457.png
{kind=link}
BIN
docs/humble/chapt7/get_started/1.TF2介绍/imgs/image-20220426181252686.png
{kind=link}
BIN
docs/humble/chapt7/get_started/1.TF2介绍/imgs/simple_robot.png
{kind=link}

BIN
docs/humble/chapt7/get_started/2.坐标变换发布监听Python实现/imgs/image-20211121154439315.png
{kind=link}
BIN
docs/humble/chapt7/get_started/2.坐标变换发布监听Python实现/imgs/image-20211121155823712-165544014145012.png
{kind=link}

BIN
docs/humble/chapt7/get_started/2.坐标变换发布监听Python实现/imgs/image-20211121155823712.png
{kind=link}
BIN
docs/humble/chapt7/get_started/2.坐标变换发布监听Python实现/imgs/image-20211121160026637-165544014304913.png
{kind=link}

BIN
docs/humble/chapt7/get_started/2.坐标变换发布监听Python实现/imgs/image-20211121160026637.png
{kind=link}
BIN
docs/humble/chapt7/get_started/2.坐标变换发布监听Python实现/imgs/image-20211121160308411-165544014052111.png
{kind=link}

BIN
docs/humble/chapt7/get_started/2.坐标变换发布监听Python实现/imgs/image-20211121160308411.png
{kind=link}