|
|
@@ -1,4 +1,4 @@
|
|
|
-- [**ROS2代码模板**](humble/codebook/README.md)
|
|
|
+- [代码模板](humble/codebook/README.md)
|
|
|
- rclcpp
|
|
|
- [节点](humble/codebook/rclcpp/nodes.md)
|
|
|
- [参数](humble/codebook/rclcpp/parameters.md)
|
|
|
@@ -6,333 +6,337 @@
|
|
|
- [时间](humble/codebook/rclcpp/time.md)
|
|
|
- [点云PCL](humble/codebook/rclcpp/pcl.md)
|
|
|
- [解决方案](humble/codebook/rclcpp/workarounds.md)
|
|
|
-
|
|
|
- rclpy
|
|
|
- [节点](humble/codebook/rclpy/nodes.md)
|
|
|
- [参数](humble/codebook/rclpy/parameters.md)
|
|
|
- [tf2](humble/codebook/rclpy/tf2.md)
|
|
|
- [时间](humble/codebook/rclpy/time.md)
|
|
|
-
|
|
|
- 其他相关
|
|
|
- [CMake](humble/codebook/pages/cmake.md)
|
|
|
- [Colcon](humble/codebook/pages/colcon.md)
|
|
|
- [Launch](humble/codebook/pages/launch.md)
|
|
|
- [网络通讯](humble/codebook/pages/networking.md)
|
|
|
- [功能包](humble/codebook/pages/packages.md)
|
|
|
-- 第 1 章 ROS2介绍与安装
|
|
|
- - [章节导读](humble/chapt1/章节导读.md)
|
|
|
- - 基础篇-Linux基础
|
|
|
- - [1.Linux与Ubuntu系统介绍](humble/chapt1/basic/1.Linux与Ubuntu系统介绍.md)
|
|
|
- - [2.在虚拟机中安装Ubuntu](humble/chapt1/basic/2.在虚拟机中安装Ubuntu.md)
|
|
|
- - [3.玩转Ubuntu之常用指令](humble/chapt1/basic/3.玩转Ubuntu之常用指令.md)
|
|
|
- - [4.玩转Ubuntu之编程工具](humble/chapt1/basic/4.玩转Ubuntu之编程工具.md)
|
|
|
- - [5.玩转Ubuntu之常用软件](humble/chapt1/basic/5.玩转Ubuntu之常用软件.md)
|
|
|
- - [入门篇-ROS2介绍安装]()
|
|
|
- - [1.ROS与ROS2对比](humble/chapt1/get_started/2.ROS与ROS2对比.md)
|
|
|
- - [2.ROS与ROS2对比](humble/chapt1/get_started/2.ROS与ROS2对比.md)
|
|
|
- - [3.动手安装ROS2](humble/chapt1/get_started/3.动手安装ROS2.md)
|
|
|
- - [4.ROS2初体验](humble/chapt1/get_started/4.ROS2初体验.md)
|
|
|
- - [进阶篇-架构与中间件]()
|
|
|
- - [1.ROS2系统架构](humble/chapt1/advanced/1.ROS2系统架构.md)
|
|
|
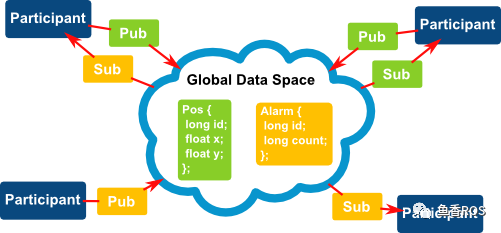
- - [2.中间件DDS架构](humble/chapt1/advanced/2.中间件DDS架构.md)
|
|
|
-
|
|
|
-- 第 2 章 ROS2第一个节点
|
|
|
- - 章节导读
|
|
|
- - [基础篇-编程基础]()
|
|
|
- - C++编译工具之CMake
|
|
|
- - Python打包工具之Setup
|
|
|
- - CMake依赖查找流程
|
|
|
- - Python依赖查找流程
|
|
|
- - [入门篇-动手使用ROS2]()
|
|
|
- - ROS2节点与工作空间
|
|
|
- - ROS2编译器之Colcon
|
|
|
- - ROS2客户端库知多少
|
|
|
- - 使用RCLCPP编写节点
|
|
|
- - 使用RCLPY编写节点
|
|
|
- - [进阶篇-ROS2系统]()
|
|
|
- - 五种不同的方式编写节点
|
|
|
- - 生命周期节点介绍
|
|
|
- - ROS2节点发现机制原理
|
|
|
- - Colcon编译原理
|
|
|
- - ROS2包运行原理
|
|
|
- - ROS2客户端库源码导读
|
|
|
-- 第 3 章 ROS2通信之话题与服务
|
|
|
- - 章节导读
|
|
|
- - [基础篇-中间件与面向对象基础]()
|
|
|
- - 常见通信方式与原理
|
|
|
- - 通信中间件之DDS与ZMQ
|
|
|
- - 多线程回调函数和锁
|
|
|
- - 面向对象编程知多少
|
|
|
- - [入门篇-话题与服务]()
|
|
|
- - ROS2话题入门
|
|
|
- - 话题之RCLCPP实现
|
|
|
- - 话题之RCLPY实现
|
|
|
- - ROS2服务入门
|
|
|
- - 服务之RCLCPP实现
|
|
|
- - 服务之RCLPY实现
|
|
|
- - ROS2接口介绍
|
|
|
- - 自定义话题接口通信
|
|
|
- - 自定义服务接口通信
|
|
|
- - [进阶篇-中间件进阶]()
|
|
|
- - 原始数据类型与包装类型
|
|
|
- - 通信质量Qos配置指南
|
|
|
- - 为什么ROS2选择DDS
|
|
|
- - DDS进阶之Fast-DDS环境搭建
|
|
|
- - 使用DDS进行订阅发布
|
|
|
-- 第 4 章 ROS2通信之参数与动作
|
|
|
- - 章节导读
|
|
|
- - [基础篇-控制概述]()
|
|
|
- - 机器人控制概述
|
|
|
- - [入门篇-参数与动作]()
|
|
|
- - 参数(Param)介绍
|
|
|
- - 参数之RCLCPP实现
|
|
|
- - 参数之RCLPY实现
|
|
|
- - 动作(Action)介绍
|
|
|
- - 动作之RCLCPP实现
|
|
|
- - 动作之RCLPY实现
|
|
|
- - 自定义动作接口通信
|
|
|
- - 通信机制对比总结
|
|
|
- - [进阶篇-原理进阶]()
|
|
|
- - 参数机制原理
|
|
|
- - 动作通信原理
|
|
|
- - ROS2如何兼容多家DDS
|
|
|
- - 高效的ROS2进程内通信
|
|
|
- - 使用ZeroMQ进行订阅发布
|
|
|
-- 第 5 章 ROS2常用工具
|
|
|
- - 章节导读
|
|
|
- - [基础篇-相关概念]()
|
|
|
- - QT是什么
|
|
|
- - 仿真引擎
|
|
|
- - 常见配置文件格式
|
|
|
- - [入门篇-常用工具]()
|
|
|
- - 命令行工具-ROS2CLI
|
|
|
- - 启动管理工具-Launch
|
|
|
- - 数据录播工具-rosbag
|
|
|
- - 数据可视化工具-RVIZ
|
|
|
- - 常用调试小工具-RQT
|
|
|
- - 兼容仿真工具-Gazebo
|
|
|
- - [进阶篇-工具进阶]()
|
|
|
- - RVIZ2插件开发指南
|
|
|
- - RQT插件开发指南
|
|
|
- - 兼容仿真工具-WeBots
|
|
|
- - 兼容仿真工具-Unity
|
|
|
|
|
|
+- (一)ROS2入门篇
|
|
|
+ - 第 1 章 ROS2介绍与安装
|
|
|
+ - [章节导读](humble/chapt1/章节导读.md)
|
|
|
+ - 基础篇-Linux基础
|
|
|
+ - [1.Linux与Ubuntu系统介绍](humble/chapt1/basic/1.Linux与Ubuntu系统介绍.md)
|
|
|
+ - [2.在虚拟机中安装Ubuntu](humble/chapt1/basic/2.在虚拟机中安装Ubuntu.md)
|
|
|
+ - [3.玩转Ubuntu之常用指令](humble/chapt1/basic/3.玩转Ubuntu之常用指令.md)
|
|
|
+ - [4.玩转Ubuntu之编程工具](humble/chapt1/basic/4.玩转Ubuntu之编程工具.md)
|
|
|
+ - [5.玩转Ubuntu之常用软件](humble/chapt1/basic/5.玩转Ubuntu之常用软件.md)
|
|
|
+ - 入门篇-ROS2介绍安装
|
|
|
+ - [1.ROS与ROS2对比](humble/chapt1/get_started/2.ROS与ROS2对比.md)
|
|
|
+ - [2.ROS与ROS2对比](humble/chapt1/get_started/2.ROS与ROS2对比.md)
|
|
|
+ - [3.动手安装ROS2](humble/chapt1/get_started/3.动手安装ROS2.md)
|
|
|
+ - [4.ROS2初体验](humble/chapt1/get_started/4.ROS2初体验.md)
|
|
|
+ - 进阶篇-架构与中间件
|
|
|
+ - [1.ROS2系统架构](humble/chapt1/advanced/1.ROS2系统架构.md)
|
|
|
+ - [2.中间件DDS架构](humble/chapt1/advanced/2.中间件DDS架构.md)
|
|
|
+ - 第 2 章 ROS2第一个节点
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-编程基础
|
|
|
+ - C++编译工具之CMake
|
|
|
+ - Python打包工具之Setup
|
|
|
+ - CMake依赖查找流程
|
|
|
+ - Python依赖查找流程
|
|
|
+ - 入门篇-动手使用ROS2
|
|
|
+ - ROS2节点与工作空间
|
|
|
+ - ROS2编译器之Colcon
|
|
|
+ - ROS2客户端库知多少
|
|
|
+ - 使用RCLCPP编写节点
|
|
|
+ - 使用RCLPY编写节点
|
|
|
+ - 进阶篇-ROS2系统
|
|
|
+ - 五种不同的方式编写节点
|
|
|
+ - 生命周期节点介绍
|
|
|
+ - ROS2节点发现机制原理
|
|
|
+ - Colcon编译原理
|
|
|
+ - ROS2包运行原理
|
|
|
+ - ROS2客户端库源码导读
|
|
|
+ - 第 3 章 ROS2通信之话题与服务
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-中间件与面向对象基础
|
|
|
+ - 常见通信方式与原理
|
|
|
+ - 通信中间件之DDS与ZMQ
|
|
|
+ - 多线程回调函数和锁
|
|
|
+ - 面向对象编程知多少
|
|
|
+ - 入门篇-话题与服务
|
|
|
+ - ROS2话题入门
|
|
|
+ - 话题之RCLCPP实现
|
|
|
+ - 话题之RCLPY实现
|
|
|
+ - ROS2服务入门
|
|
|
+ - 服务之RCLCPP实现
|
|
|
+ - 服务之RCLPY实现
|
|
|
+ - ROS2接口介绍
|
|
|
+ - 自定义话题接口通信
|
|
|
+ - 自定义服务接口通信
|
|
|
+ - 进阶篇-中间件进阶
|
|
|
+ - 原始数据类型与包装类型
|
|
|
+ - 通信质量Qos配置指南
|
|
|
+ - 为什么ROS2选择DDS
|
|
|
+ - DDS进阶之Fast-DDS环境搭建
|
|
|
+ - 使用DDS进行订阅发布
|
|
|
+ - 第 4 章 ROS2通信之参数与动作
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-控制概述
|
|
|
+ - 机器人控制概述
|
|
|
+ - 入门篇-参数与动作
|
|
|
+ - 参数(Param)介绍
|
|
|
+ - 参数之RCLCPP实现
|
|
|
+ - 参数之RCLPY实现
|
|
|
+ - 动作(Action)介绍
|
|
|
+ - 动作之RCLCPP实现
|
|
|
+ - 动作之RCLPY实现
|
|
|
+ - 自定义动作接口通信
|
|
|
+ - 通信机制对比总结
|
|
|
+ - 进阶篇-原理进阶
|
|
|
+ - 参数机制原理
|
|
|
+ - 动作通信原理
|
|
|
+ - ROS2如何兼容多家DDS
|
|
|
+ - 高效的ROS2进程内通信
|
|
|
+ - 使用ZeroMQ进行订阅发布
|
|
|
+ - 第 5 章 ROS2常用工具
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-相关概念
|
|
|
+ - QT是什么
|
|
|
+ - 仿真引擎
|
|
|
+ - 常见配置文件格式
|
|
|
+ - 入门篇-常用工具
|
|
|
+ - 命令行工具-ROS2CLI
|
|
|
+ - 启动管理工具-Launch
|
|
|
+ - 数据录播工具-rosbag
|
|
|
+ - 数据可视化工具-RVIZ
|
|
|
+ - 常用调试小工具-RQT
|
|
|
+ - 兼容仿真工具-Gazebo
|
|
|
+ - 进阶篇-工具进阶
|
|
|
+ - RVIZ2插件开发指南
|
|
|
+ - RQT插件开发指南
|
|
|
+ - 兼容仿真工具-WeBots
|
|
|
+ - 兼容仿真工具-Unity
|
|
|
|
|
|
-- 第 6 章 运动学基础
|
|
|
- - 章节导读
|
|
|
- - [基础篇-数学基础]()
|
|
|
- - 矩阵与矩阵运算
|
|
|
- - MiniConda与Jupyter介绍安装
|
|
|
- - [入门篇-机器人运动学]()
|
|
|
- - 空间坐标描述
|
|
|
- - 姿态的多种表示
|
|
|
- - 齐次坐标变换
|
|
|
- - 两轮差速运动学
|
|
|
- - 机械臂运动学
|
|
|
- - [进阶篇-运动学进阶]()
|
|
|
- - 动力学基础-力与速度
|
|
|
+- (二)机器人学篇
|
|
|
+ - 第 6 章 运动学基础
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-数学基础
|
|
|
+ - 矩阵与矩阵运算
|
|
|
+ - MiniConda与Jupyter介绍安装
|
|
|
+ - 入门篇-机器人运动学
|
|
|
+ - 空间坐标描述
|
|
|
+ - 姿态的多种表示
|
|
|
+ - 齐次坐标变换
|
|
|
+ - 两轮差速运动学
|
|
|
+ - 机械臂运动学
|
|
|
+ - 进阶篇-运动学进阶
|
|
|
+ - 动力学基础-力与速度
|
|
|
|
|
|
-- 第 7 章 ROS2运动学
|
|
|
- - 章节导读
|
|
|
- - [基础篇-常用工具]()
|
|
|
- - MiniConda与Jupyter介绍安装
|
|
|
- - [入门篇-机器人运动学]()
|
|
|
- - TF2介绍
|
|
|
- - 坐标变换发布监听Python实现
|
|
|
- - 坐标变换发布监听C++实现
|
|
|
- - 坐标变换可视化
|
|
|
- - [进阶篇-时间机制]()
|
|
|
- - ROS2时间机制
|
|
|
+ - 第 7 章 ROS2运动学
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-常用工具
|
|
|
+ - MiniConda与Jupyter介绍安装
|
|
|
+ - 入门篇-机器人运动学
|
|
|
+ - TF2介绍
|
|
|
+ - 坐标变换发布监听Python实现
|
|
|
+ - 坐标变换发布监听C++实现
|
|
|
+ - 坐标变换可视化
|
|
|
+ - 进阶篇-时间机制
|
|
|
+ - ROS2时间机制
|
|
|
|
|
|
|
|
|
-- 第 8 章 机器人建模
|
|
|
- - 章节导读
|
|
|
- - [基础篇-概念]()
|
|
|
- - 常见机器人构型
|
|
|
- - 常见建模软件及工具
|
|
|
- - [入门篇-机器人建模]()
|
|
|
- - URDF建模介绍
|
|
|
- - RVIZ2可视化URDF模型
|
|
|
- - 创建一个两轮差速模型
|
|
|
- - 两轮差速可视化及关节控制
|
|
|
- - 创建一个机械臂模型
|
|
|
- - 机械臂可视化及关节控制
|
|
|
- - [进阶篇-其他建模方式]()
|
|
|
- - Xacro介绍
|
|
|
- - 使用Xacro简化机器人模型
|
|
|
- - RVIZ2可视化机器人模型原理
|
|
|
- - SolidWorks导出URDF
|
|
|
- - 机械臂建模之DH参数
|
|
|
+- (三)建模仿真篇
|
|
|
+ - 第 8 章 机器人建模
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-概念
|
|
|
+ - 常见机器人构型
|
|
|
+ - 常见建模软件及工具
|
|
|
+ - 入门篇-机器人建模
|
|
|
+ - URDF建模介绍
|
|
|
+ - RVIZ2可视化URDF模型
|
|
|
+ - 创建一个两轮差速模型
|
|
|
+ - 两轮差速可视化及关节控制
|
|
|
+ - 创建一个机械臂模型
|
|
|
+ - 机械臂可视化及关节控制
|
|
|
+ - 进阶篇-其他建模方式
|
|
|
+ - Xacro介绍
|
|
|
+ - 使用Xacro简化机器人模型
|
|
|
+ - RVIZ2可视化机器人模型原理
|
|
|
+ - SolidWorks导出URDF
|
|
|
+ - 机械臂建模之DH参数
|
|
|
|
|
|
-- 第 9 章 机器人仿真
|
|
|
- - 章节导读
|
|
|
- - [基础篇-概念]()
|
|
|
- - 刚体及其动力学参数
|
|
|
- - [入门篇-机器人仿真]()
|
|
|
- - 仿真软件Gazebo介绍与安装
|
|
|
- - 给两轮差速机器人添加物理参数
|
|
|
- - 在Gazebo加载机器人模型
|
|
|
- - Gazebo仿真插件之IMU
|
|
|
- - Gazebo仿真插件之激光雷达
|
|
|
- - Gazebo仿真插件之两轮差速
|
|
|
- - [进阶篇]()
|
|
|
- - Gazebo仿真插件之超声波
|
|
|
- - Gazebo仿真插件之深度相机
|
|
|
+ - 第 9 章 机器人仿真
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-概念
|
|
|
+ - 刚体及其动力学参数
|
|
|
+ - 入门篇-机器人仿真
|
|
|
+ - 仿真软件Gazebo介绍与安装
|
|
|
+ - 给两轮差速机器人添加物理参数
|
|
|
+ - 在Gazebo加载机器人模型
|
|
|
+ - Gazebo仿真插件之IMU
|
|
|
+ - Gazebo仿真插件之激光雷达
|
|
|
+ - Gazebo仿真插件之两轮差速
|
|
|
+ - 进阶篇
|
|
|
+ - Gazebo仿真插件之超声波
|
|
|
+ - Gazebo仿真插件之深度相机
|
|
|
|
|
|
-- 第 10 章 SLAM建图
|
|
|
- - 章节导读
|
|
|
- - [基础篇-图像基础]()
|
|
|
- - 图像常见格式及存储
|
|
|
- - 栅格地图介绍
|
|
|
- - [入门篇-SLAM建图]()
|
|
|
- - SLAM前世今生
|
|
|
- - Gazebo仿真环境搭建
|
|
|
- - Carto介绍及安装
|
|
|
- - 配置FishBot进行建图
|
|
|
- - SLAM地图概述
|
|
|
- - ROS2地图加载与编辑
|
|
|
- - [进阶篇-Carto与地图处理]()
|
|
|
- - 使用OPENCV加载地图
|
|
|
- - 使用纯雷达定位建图
|
|
|
- - Carto纯定位模式
|
|
|
+- (四)Nav2导航篇
|
|
|
+ - 第 10 章 SLAM建图
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-图像基础
|
|
|
+ - 图像常见格式及存储
|
|
|
+ - 栅格地图介绍
|
|
|
+ - 入门篇-SLAM建图
|
|
|
+ - SLAM前世今生
|
|
|
+ - Gazebo仿真环境搭建
|
|
|
+ - Carto介绍及安装
|
|
|
+ - 配置FishBot进行建图
|
|
|
+ - SLAM地图概述
|
|
|
+ - ROS2地图加载与编辑
|
|
|
+ - 进阶篇-Carto与地图处理
|
|
|
+ - 使用OPENCV加载地图
|
|
|
+ - 使用纯雷达定位建图
|
|
|
+ - Carto纯定位模式
|
|
|
|
|
|
-- 第 11 章 Nav2导航仿真实战
|
|
|
- - 章节导读
|
|
|
- - [基础篇-基础知识]()
|
|
|
- - 行为树是什么
|
|
|
- - [入门篇-SLAM建图]()
|
|
|
- - Nav2导航参数介绍
|
|
|
- - Gazebo仿真环境搭建
|
|
|
- - Carto介绍及安装
|
|
|
- - 配置FishBot进行建图
|
|
|
- - SLAM地图概述
|
|
|
- - Nav2导航API
|
|
|
- - [进阶篇-Carto与地图处理]()
|
|
|
- - 使用OPENCV加载地图
|
|
|
- - 使用纯雷达定位建图
|
|
|
- - Carto纯定位模式
|
|
|
+ - 第 11 章 Nav2导航仿真实战
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-基础知识
|
|
|
+ - 行为树是什么
|
|
|
+ - 入门篇-SLAM建图
|
|
|
+ - Nav2导航参数介绍
|
|
|
+ - Gazebo仿真环境搭建
|
|
|
+ - Carto介绍及安装
|
|
|
+ - 配置FishBot进行建图
|
|
|
+ - SLAM地图概述
|
|
|
+ - Nav2导航API
|
|
|
+ - 进阶篇-Carto与地图处理
|
|
|
+ - 使用OPENCV加载地图
|
|
|
+ - 使用纯雷达定位建图
|
|
|
+ - Carto纯定位模式
|
|
|
|
|
|
-- 第 12 章 Nav2进阶实践
|
|
|
- - 章节导读
|
|
|
- - [基础篇-路径搜索]()
|
|
|
- - 搜索之A星算法
|
|
|
- - [入门篇-自定义Nav2插件]()
|
|
|
- - Nav2插件介绍
|
|
|
- - 自定义规划器插件
|
|
|
- - 自定义代价地图层
|
|
|
- - [进阶篇-优化配置]()
|
|
|
- - 使用Carto纯定位替换AMCL
|
|
|
+ - 第 12 章 Nav2进阶实践
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-路径搜索
|
|
|
+ - 搜索之A星算法
|
|
|
+ - 入门篇-自定义Nav2插件
|
|
|
+ - Nav2插件介绍
|
|
|
+ - 自定义规划器插件
|
|
|
+ - 自定义代价地图层
|
|
|
+ - 进阶篇-优化配置
|
|
|
+ - 使用Carto纯定位替换AMCL
|
|
|
|
|
|
-- 第 13 章 ROS2-Control
|
|
|
- - 章节导读
|
|
|
- - [基础篇-传感器与执行器]()
|
|
|
- - 硬件传感器
|
|
|
- - 机器人执行器
|
|
|
- - [入门篇-ROS2Control]()
|
|
|
- - ROS2Control是什么
|
|
|
- - 控制器及CLI介绍
|
|
|
- - 机械臂轨迹控制器配置
|
|
|
- - 两轮差速控制器配置
|
|
|
- - [进阶篇-架构原理]()
|
|
|
- - ROS2Control架构剖析
|
|
|
- - 提高ROS2-Control实时性
|
|
|
+- (五)ROS2控制硬件篇
|
|
|
+ - 第 13 章 ROS2-Control
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-传感器与执行器
|
|
|
+ - 硬件传感器
|
|
|
+ - 机器人执行器
|
|
|
+ - 入门篇-ROS2Control
|
|
|
+ - ROS2Control是什么
|
|
|
+ - 控制器及CLI介绍
|
|
|
+ - 机械臂轨迹控制器配置
|
|
|
+ - 两轮差速控制器配置
|
|
|
+ - 进阶篇-架构原理
|
|
|
+ - ROS2Control架构剖析
|
|
|
+ - 提高ROS2-Control实时性
|
|
|
|
|
|
-- 第 14 章 MicroROS
|
|
|
- - 章节导读
|
|
|
- - [基础篇-微处理器]()
|
|
|
- - MCU微处理器介绍
|
|
|
- - RTOS系统介绍
|
|
|
- - [入门篇-MicroROS]()
|
|
|
- - MicroROS介绍
|
|
|
- - [进阶篇-原理解析]()
|
|
|
- - MiCroROS架构原理
|
|
|
+ - 第 14 章 MicroROS
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-微处理器
|
|
|
+ - MCU微处理器介绍
|
|
|
+ - RTOS系统介绍
|
|
|
+ - 入门篇-MicroROS
|
|
|
+ - MicroROS介绍
|
|
|
+ - 进阶篇-原理解析
|
|
|
+ - MiCroROS架构原理
|
|
|
|
|
|
+ - 第 15 章 ROS2控制硬件实战
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-ESP32开发
|
|
|
+ - 舵机介绍及控制
|
|
|
+ - ESP32开发环境搭建
|
|
|
+ - ESP32第一行代码
|
|
|
+ - 入门篇-ROS2控制硬件实战
|
|
|
+ - ESP32配置MicroROS
|
|
|
+ - ESP32实现订阅发布
|
|
|
+ - ESP32实现舵机控制
|
|
|
+ - 配置ROS2Control实现舵机控制
|
|
|
+ - 进阶篇-实战演练
|
|
|
+ - 通过ROS2控制灯的开关
|
|
|
+ - ROS2-ESP32多舵机驱动
|
|
|
+ - 做一个三自由度机械臂
|
|
|
|
|
|
-- 第 15 章 ROS2控制硬件实战
|
|
|
- - 章节导读
|
|
|
- - [基础篇-ESP32开发]()
|
|
|
- - 舵机介绍及控制
|
|
|
- - ESP32开发环境搭建
|
|
|
- - ESP32第一行代码
|
|
|
- - [入门篇-ROS2控制硬件实战]()
|
|
|
- - ESP32配置MicroROS
|
|
|
- - ESP32实现订阅发布
|
|
|
- - ESP32实现舵机控制
|
|
|
- - 配置ROS2Control实现舵机控制
|
|
|
- - [进阶篇-实战演练]()
|
|
|
- - 通过ROS2控制灯的开关
|
|
|
- - ROS2-ESP32多舵机驱动
|
|
|
- - 做一个三自由度机械臂
|
|
|
|
|
|
-- 第 16 章 实体机器人硬件搭建
|
|
|
- - 章节导读
|
|
|
- - [基础篇-硬件基础篇]()
|
|
|
- - 电机及电机驱动板
|
|
|
- - IMU模块介绍
|
|
|
- - 超声波传感器介绍
|
|
|
- - [入门篇-实体机器人硬件搭建]()
|
|
|
- - 硬件架构介绍
|
|
|
- - 硬件选型
|
|
|
- - 硬件搭建
|
|
|
- - [进阶篇-进阶实战]()
|
|
|
- - 使用CRC校验增加数据
|
|
|
+- (六)实体机器人搭建篇
|
|
|
+ - 第 16 章 实体机器人硬件搭建
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-硬件基础篇
|
|
|
+ - 电机及电机驱动板
|
|
|
+ - IMU模块介绍
|
|
|
+ - 超声波传感器介绍
|
|
|
+ - 入门篇-实体机器人硬件搭建
|
|
|
+ - 硬件架构介绍
|
|
|
+ - 硬件选型
|
|
|
+ - 硬件搭建
|
|
|
+ - 进阶篇-进阶实战
|
|
|
+ - 使用CRC校验增加数据
|
|
|
|
|
|
-- 第 17 章 嵌入式控制及通信开发
|
|
|
- - 章节导读
|
|
|
- - [基础篇-ESP32开发]()
|
|
|
- - 电脑是如何控制硬件的
|
|
|
- - PID理论介绍
|
|
|
- - [入门篇-嵌入式控制及通信开发]()
|
|
|
- - 使用ESP32驱动电机
|
|
|
- - 使用ESP32读取编码器数据
|
|
|
- - 使用ESP32读取IMU数据
|
|
|
- - 通信设计(待定)
|
|
|
- - 上位机SDK开发
|
|
|
- - [进阶篇-实战演练]()
|
|
|
- - EKF融合里程计和IMU数据
|
|
|
+ - 第 17 章 嵌入式控制及通信开发
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-ESP32开发
|
|
|
+ - 电脑是如何控制硬件的
|
|
|
+ - PID理论介绍
|
|
|
+ - 入门篇-嵌入式控制及通信开发
|
|
|
+ - 使用ESP32驱动电机
|
|
|
+ - 使用ESP32读取编码器数据
|
|
|
+ - 使用ESP32读取IMU数据
|
|
|
+ - 通信设计(待定)
|
|
|
+ - 上位机SDK开发
|
|
|
+ - 进阶篇-实战演练
|
|
|
+ - EKF融合里程计和IMU数据
|
|
|
|
|
|
-- 第 18 章 上位机建图及导航
|
|
|
- - 章节导读
|
|
|
- - [基础篇-ESP32开发]()
|
|
|
- - [入门篇-上位机建图及导航]()
|
|
|
- - 真机建图导航指南
|
|
|
- - 上位机驱动封装
|
|
|
- - Carto真机建图
|
|
|
- - Nav2真机导航及配置
|
|
|
- - [进阶篇-实战演练]()
|
|
|
- - 使用纯激光进行导航
|
|
|
+ - 第 18 章 上位机建图及导航
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-ESP32开发
|
|
|
+ - 入门篇-上位机建图及导航
|
|
|
+ - 真机建图导航指南
|
|
|
+ - 上位机驱动封装
|
|
|
+ - Carto真机建图
|
|
|
+ - Nav2真机导航及配置
|
|
|
+ - 进阶篇-实战演练
|
|
|
+ - 使用纯激光进行导航
|
|
|
|
|
|
-- 第 19 章 Moveit2仿真
|
|
|
- - 章节导读
|
|
|
- - [基础篇-运动学]()
|
|
|
- - 机械臂正逆运动学
|
|
|
- - [入门篇-Moveit2仿真]()
|
|
|
- - Moveit2框架介绍
|
|
|
- - 通过URDF配置Moveit2
|
|
|
- - 通过键盘控制机械臂运动
|
|
|
- - Moveit2-API控制机械臂
|
|
|
- - 给机械臂添加夹爪控制器
|
|
|
- - [进阶篇-架构]()
|
|
|
- - Moveit2架构剖析
|
|
|
+- (七)Moveit2机械臂篇
|
|
|
+ - 第 19 章 Moveit2仿真
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-运动学
|
|
|
+ - 机械臂正逆运动学
|
|
|
+ - 入门篇-Moveit2仿真
|
|
|
+ - Moveit2框架介绍
|
|
|
+ - 通过URDF配置Moveit2
|
|
|
+ - 通过键盘控制机械臂运动
|
|
|
+ - Moveit2-API控制机械臂
|
|
|
+ - 给机械臂添加夹爪控制器
|
|
|
+ - 进阶篇-架构
|
|
|
+ - Moveit2架构剖析
|
|
|
|
|
|
-- 第 20 章 Moveit2进阶
|
|
|
- - 章节导读
|
|
|
- - [基础篇-算法]()
|
|
|
- - 路径搜索之RRT算法
|
|
|
- - 路径平滑算法
|
|
|
- - [入门篇-Moveit2进阶]()
|
|
|
- - 自定义规划器
|
|
|
- - 自定义运动学求解器
|
|
|
- - [进阶篇-实战演练]()
|
|
|
- - 暂定
|
|
|
+ - 第 20 章 Moveit2进阶
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-算法
|
|
|
+ - 路径搜索之RRT算法
|
|
|
+ - 路径平滑算法
|
|
|
+ - 入门篇-Moveit2进阶
|
|
|
+ - 自定义规划器
|
|
|
+ - 自定义运动学求解器
|
|
|
+ - 进阶篇-实战演练
|
|
|
+ - 暂定
|
|
|
|
|
|
-- 第 21 章 Moveit2真机控制
|
|
|
- - 章节导读
|
|
|
- - [基础篇-动力学]()
|
|
|
- - 三次/五次样条插值
|
|
|
- - [入门篇-Moveit2真机控制]()
|
|
|
- - 机械臂硬件架构
|
|
|
- - 自制机械臂控制及ROS2Control配置
|
|
|
- - 使用Moveit2控制真实机械臂
|
|
|
- - [进阶篇-实战演练]()
|
|
|
- - 使用真实机械臂完成抓取
|
|
|
+ - 第 21 章 Moveit2真机控制
|
|
|
+ - 章节导读
|
|
|
+ - 基础篇-动力学
|
|
|
+ - 三次/五次样条插值
|
|
|
+ - 入门篇-Moveit2真机控制
|
|
|
+ - 机械臂硬件架构
|
|
|
+ - 自制机械臂控制及ROS2Control配置
|
|
|
+ - 使用Moveit2控制真实机械臂
|
|
|
+ - 进阶篇-实战演练
|
|
|
+ - 使用真实机械臂完成抓取
|

 鱼香ROS
鱼香ROS
{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}
