
 鱼香ROS
鱼香ROS
69 zmienionych plików z 1534 dodań i 22 usunięć
+ 12
- 12
docs/_sidebar.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 2
- 2
docs/humble/chapt1/advanced/2.中间件DDS架构.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 2
- 0
docs/humble/chapt1/basic/4.玩转Ubuntu之编程工具.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 20
- 1
docs/humble/chapt1/get_started/3.动手安装ROS2.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 7
- 7
docs/humble/chapt1/get_started/4.ROS2初体验.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt1/get_started/4.ROS2初体验/imgs/image-20220603124658803.png
{kind=link}
BIN
docs/humble/chapt1/get_started/4.ROS2初体验/imgs/image-20220603124701935.png
{kind=link}
BIN
docs/humble/chapt1/get_started/4.ROS2初体验/imgs/image-20220603124722852.png
{kind=link}
BIN
docs/humble/chapt1/get_started/4.ROS2初体验/imgs/image-20220603124742399.png
{kind=link}

BIN
docs/humble/chapt1/get_started/4.ROS2初体验/imgs/image-20220603124845382.png
{kind=link}
BIN
docs/humble/chapt1/get_started/4.ROS2初体验/imgs/image-20220603125332498.png
{kind=link}
+ 11
- 0
docs/humble/chapt2/advanced/1.五种不同的方式编写节点.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 11
- 0
docs/humble/chapt2/advanced/2.生命周期节点介绍.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 11
- 0
docs/humble/chapt2/advanced/3.ROS2节点发现机制原理.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 11
- 0
docs/humble/chapt2/advanced/4.Colcon编译原理.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 11
- 0
docs/humble/chapt2/advanced/5.ROS2包运行原理.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
+ 11
- 0
docs/humble/chapt2/advanced/6.ROS2客户端库源码导读.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/basic/1.C++编译工具之CMake/imgs/SouthEast.png
{kind=link}
BIN
docs/humble/chapt2/basic/1.C++编译工具之CMake/imgs/image-20220603130600648.png
{kind=link}

BIN
docs/humble/chapt2/basic/1.C++编译工具之CMake/imgs/image-20220603131959194.png
{kind=link}
BIN
docs/humble/chapt2/basic/1.C++编译工具之CMake/imgs/image-20220603133814964.png
{kind=link}

BIN
docs/humble/chapt2/basic/1.C++编译工具之CMake/imgs/image-20220603135637630.png
{kind=link}

BIN
docs/humble/chapt2/basic/1.C++编译工具之CMake/imgs/image-20220603135717676.png
{kind=link}
BIN
docs/humble/chapt2/basic/1.C++编译工具之CMake/imgs/image-20220603135942917.png
{kind=link}

BIN
docs/humble/chapt2/basic/1.C++编译工具之CMake/imgs/image-20220603143016936.png
{kind=link}
BIN
docs/humble/chapt2/basic/1.C++编译工具之CMake/imgs/image-20220603145533742.png
{kind=link}
+ 199
- 0
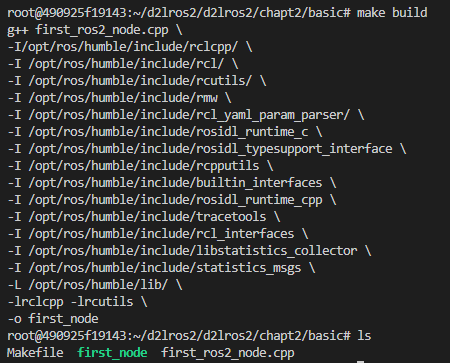
docs/humble/chapt2/basic/1.使用g++编译ROS2节点.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/basic/1.使用g++编译ROS2节点/imgs/SouthEast.png
{kind=link}
BIN
docs/humble/chapt2/basic/1.使用g++编译ROS2节点/imgs/image-20220603130600648.png
{kind=link}

BIN
docs/humble/chapt2/basic/1.使用g++编译ROS2节点/imgs/image-20220603131959194.png
{kind=link}
BIN
docs/humble/chapt2/basic/1.使用g++编译ROS2节点/imgs/image-20220603133814964.png
{kind=link}

BIN
docs/humble/chapt2/basic/2.Python打包工具之Setup/imgs/image-20220603154952746.png
{kind=link}

+ 70
- 0
docs/humble/chapt2/basic/2.使用make编译ROS2节点.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/basic/2.使用make编译ROS2节点/imgs/image-20220603135717676.png
{kind=link}
BIN
docs/humble/chapt2/basic/2.使用make编译ROS2节点/imgs/image-20220603135942917.png
{kind=link}
BIN
docs/humble/chapt2/basic/2.使用make编译ROS2节点/imgs/image-20220603161445651.png
{kind=link}

+ 77
- 0
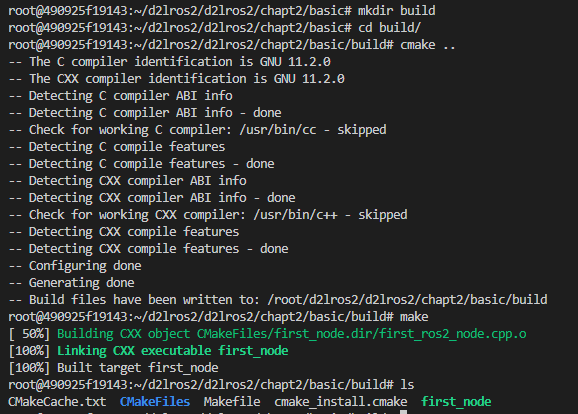
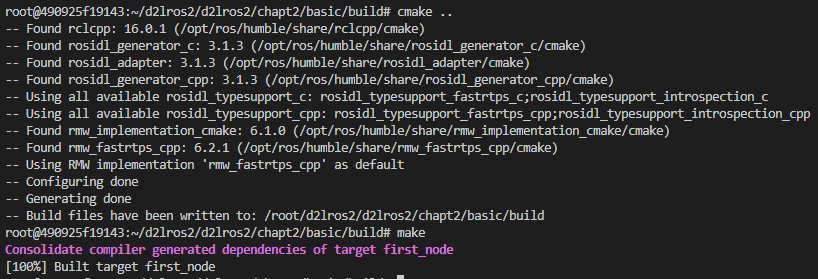
docs/humble/chapt2/basic/3.使用CMakeLists.txt编译ROS2节点.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/basic/3.使用CMakeLists.txt编译ROS2节点/imgs/image-20220603143016936.png
{kind=link}
BIN
docs/humble/chapt2/basic/3.使用CMakeLists.txt编译ROS2节点/imgs/image-20220603145533742.png
{kind=link}
+ 81
- 0
docs/humble/chapt2/basic/4.CMake依赖查找流程.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/basic/4.CMake依赖查找流程/imgs/image-20220603145533742.png
{kind=link}
+ 119
- 0
docs/humble/chapt2/basic/5.Python依赖查找流程.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/basic/5.Python依赖查找流程/imgs/image-20220603154952746.png
{kind=link}

+ 125
- 0
docs/humble/chapt2/basic/6.Python工具之Setup.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/get_started/1.ROS2节点与工作空间/imgs/Nodes-TopicandService-16542449255392.gif
{kind=link}

BIN
docs/humble/chapt2/get_started/1.ROS2节点与工作空间/imgs/Nodes-TopicandService.gif
{kind=link}

BIN
docs/humble/chapt2/get_started/1.ROS2节点与工作空间/imgs/image-20210915153915430-16542449255391.png
{kind=link}
BIN
docs/humble/chapt2/get_started/1.ROS2节点与工作空间/imgs/image-20210915153915430.png
{kind=link}
+ 111
- 0
docs/humble/chapt2/get_started/1.ROS2节点介绍.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/get_started/1.ROS2节点介绍/imgs/Nodes-TopicandService-16542449255392.gif
{kind=link}

BIN
docs/humble/chapt2/get_started/1.ROS2节点介绍/imgs/image-20210915153915430-16542449255391.png
{kind=link}
+ 148
- 0
docs/humble/chapt2/get_started/2.ROS2功能包与工作空间.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/get_started/2.功能包与工作空间/imgs/image-20210720102200144.png
{kind=link}

BIN
docs/humble/chapt2/get_started/2.功能包与工作空间/imgs/image-20210720102349238.png
{kind=link}
BIN
docs/humble/chapt2/get_started/2.功能包与工作空间/imgs/image-20210915172702101.png
{kind=link}

BIN
docs/humble/chapt2/get_started/2.节点的家之工作空间/imgs/image-20210720102200144.png
{kind=link}

BIN
docs/humble/chapt2/get_started/2.节点的家之工作空间/imgs/image-20210720102349238.png
{kind=link}
BIN
docs/humble/chapt2/get_started/2.节点的家之工作空间/imgs/image-20210915172702101.png
{kind=link}

+ 156
- 0
docs/humble/chapt2/get_started/3.ROS2编译器之Colcon.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/get_started/3.ROS2编译器之Colcon/imgs/image-20210720211422653.png
{kind=link}
BIN
docs/humble/chapt2/get_started/3.ROS2编译器之Colcon/imgs/image-20210720211959001.png
{kind=link}

+ 144
- 0
docs/humble/chapt2/get_started/4.使用RCLCPP编写节点.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/get_started/4.使用RCLCPP编写节点/imgs/image-20220603171631334.png
{kind=link}
BIN
docs/humble/chapt2/get_started/4.使用RCLCPP编写节点/imgs/image-20220603172524241.png
{kind=link}
BIN
docs/humble/chapt2/get_started/4.使用RCLCPP编写节点/imgs/image-20220603172729457.png
{kind=link}
+ 140
- 0
docs/humble/chapt2/get_started/5.使用RCLPY编写节点.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
BIN
docs/humble/chapt2/get_started/5.使用RCLPY编写节点/imgs/image-20220603174606170.png
{kind=link}
BIN
docs/humble/chapt2/get_started/5.使用RCLPY编写节点/imgs/image-20220603174623023.png
{kind=link}
+ 55
- 0
docs/humble/chapt2/章节导读.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||